Komma igång - PhotoRobot användarsupport
PhotoRobot Controls App (hädanefter kallad "CAPP") är utformad för att automatisera innehållsproduktionsprocesser (bilder, videor, 360-bilder och 3D-modeller). Denna guide består av 4 avsnitt, som var och en representerar processen.
- INSTÄLLNING - Skapa en arbetsyta: kameror, hårdvara och projekt
- CAPTURE - Kontrollera PhotoRobot hårdvara och kameror, ta bilder och video
- EDIT - Visuellt innehåll efter processen
- PUBLICERA - Generera utdatabilder i flera format, "hantera profiler"
Installera PhotoRobot Controls App
För att installera PhotoRobot Controls App på din dator, logga in på ditt PhotoRobot-konto och gå till PhotoRobot Downloads.
Not: Både den stabila versionen och en förhandsversion av CAPP är tillgängliga för nedladdning via installationsguiden. Den stabila versionen innehåller den senaste versionen av CAPP och får frekventa versionsutgåvor. Samtidigt ger förhandsversionen av CAPP tidig tillgång till de allra senaste funktionerna och korrigeringarna som överförs till den stabila versionen inom några dagar efter utvecklingen. Detta gör det möjligt för användare att testa eventuella problem som uppstår i förhandsversionen innan de kontaktar supporten, eftersom de flesta rapporterade problem i den stabila versionen redan har lösts i förhandsversionen. Tänk dock på att förhandsversionen inte rekommenderas för produktionsanvändning där stabilitet är en kritisk faktor. Förhandsversionen är under aktiv utveckling, som fortfarande kan innehålla ofullständiga funktioner eller olösta buggar.
Viktig: De äldre versionerna av CAPP är inte avsedda för kunddistribution eller offentlig distribution på grund av risken för att databasen skadas. Äldre versioner av CAPP är endast tillgängliga för auktoriserade PhotoRobot-tekniker för intern utveckling eller för extremt speciella användningsfall.
För att hitta den senaste stabila versionen och förhandsversionen av CAPP, se CAPP Senaste nedladdningsversioner.
Support och felsökning för självinstallation
Installationsprocessen börjar med att ladda ner installationsfilen.
Observera kraven för installation av CAPP:
- Användaren måste ha administratörsbehörighet på datorn som installerar CAPP.
- Datorn måste uppfylla alla PhotoRobot system- och hårdvarukrav.
- Datorn måste köra ett operativsystem som stöds med de senaste uppdateringarna.
Viktig: Observera också att CAPP inte bara består av robotstyrda kontrollfunktioner utan även drivrutiner för kameror, lampor och annan kringutrustning. Som ett resultat stöds ofta inte den senaste Mac OS-versionen omedelbart. Men om detta inträffar är det bara tillfälligt och tills alla relevanta leverantörer släpper de kompatibla biblioteken.
Även om detta kan vara obekvämt, är det mycket mindre obekvämt än kompatibilitetsproblem när du använder CAPP. Nedgradering är också ännu mer komplicerat än att undvika en för tidig uppgradering.
Efter att ha uppfyllt operativsystem- och systemkraven fortsätter installationen via installationsguiden. Logga in på PhotoRobot-kontot och fortsätt sedan med installationen genom att följa stegen nedan.
Installationen
Bekräftelse av användarens medgivande
Vid nedladdning av CAPP kräver aktivering av ett nytt användarkonto att användaren bekräftar licensavtalet för slutanvändare (EULA) och andra relaterade dokument.
Efter kontoaktivering är det sedan möjligt att granska din inlämnade samtyckesinformation via Cloud-versionen av CAPP i kontoprofilens inställningar.
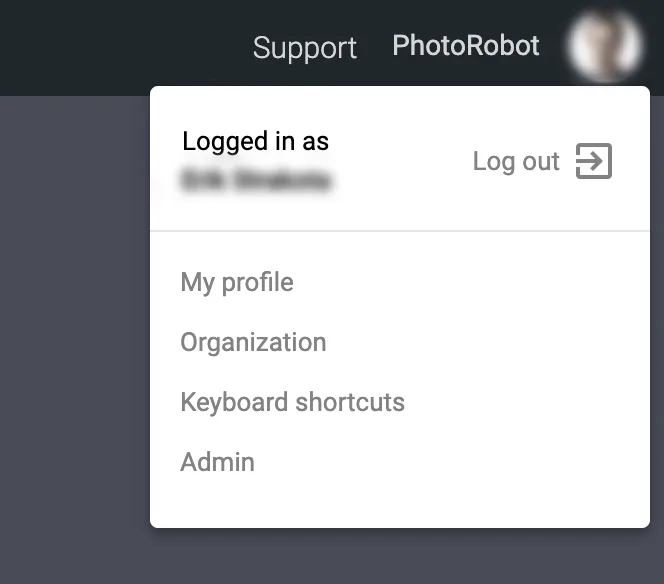
För att kontrollera din samtyckesinformation, öppna molnversionen av CAPP och klicka på användarkontoikonen i det övre högra hörnet av gränssnittet. Välj sedan Min profil från menyalternativen.

Profilmenyn visar profilfotot, allmän användarinformation (namn, telefon, företag), lösenordsinställningar och samtyckesinformation. Information om samtycke inkluderar:
- Datorns värdnamn
- Överenskommet datum
- Licensavtal för PhotoRobot International Program
- Samtycke till behandling av personuppgifter
- Information om behandling av personuppgifter
Kompatibla kameror
Viktig: För att säkerställa att CAPP kommunicerar med kameran korrekt, stäng alla andra program som ansluter till kameran. Se också till att använda en kompatibel kamera från listan över PhotoRobot-kompatibla kameramodeller.
Obs: Från och med lanseringen av PhotoRobot Controls App 2.5.4 kan alla kameror nu stödjas via tredjepartsintegration av kameror. Men för automatiserad fotografering är de senaste spegellösa Canon-kameramodellerna de mest pålitliga och effektiva.
Även om det är möjligt att använda PhotoRobot föreslagna handhållna kameror via Wi-Fi eller kabelanslutning, kan det skapa problem.
- Det kan förekomma frekventa Wi-Fi-avbrott (främst på grund av timeout). Dessa kräver tidskrävande återanslutningar till systemet.
- Om du använder en handhållen kamera via kabelanslutning finns det en komplikation med kabellängder och risk för anslutningar.
För iPhone-anslutning via PhotoRobot Touch App, notera att inga av dessa problem uppstår. iPhone kommer att kunna användas för handhållen fotografering i en installation med kontinuerlig belysning. Men om blixtfotografering är nödvändig kan kompatibla handhållna kameror fungera som ett alternativ till de rekommenderade spegellösa kamerorna. Tänk bara på de problem som kan uppstå med Wi-Fi och kabelanslutna handhållna modeller.
Kompatibla lampor
För att CAPP ska kunna kommunicera med belysning, se till att använda PhotoRobot-kompatibla studiolampor. Dessa inkluderar två typer av lampor: blixtlampor från FOMEI och Broncolor, och alla typer av LED-lampor med DMX-stöd.
Fjärrsupportinställning
Omedelbart efter installation av PhotoRobot Controls rekommenderas det att användaren laddar ner och installerar Splashtop SOS (EU-region) appen. Splashtop SOS (EU) gör det möjligt för PhotoRobot-tekniker att få åtkomst till en kunds dator och ge teknisk assistans efter att användaren har beviljat tillstånd för ett specifikt fall.
Nedladdning av Splashtop SOS samtidigt som PhotoRobot Controls hjälper till att undvika förseningar för fjärrsupportförfrågningar. Ta till exempel när en användare inte har tillräckliga rättigheter för att installera applikationen. Efter installation av Splashtop kan våra tekniker omedelbart använda Splashtop Business för att komma åt datorn med supportförfrågan.
Var dock medveten om att användaren måste ladda ner EU-regionens version av Splashtop SOS-appen. Appen för USA-regionen tillåter inte våra tekniker att komma åt din dator.
Se därför till att du använder följande EU-regionlänk för att ladda ner Splashtop SOS:
Obs: För mer information om hur du ställer in fjärrsupport för PhotoRobot-system, se PhotoRobot Remote Support Setup.
Skapa en arbetsyta
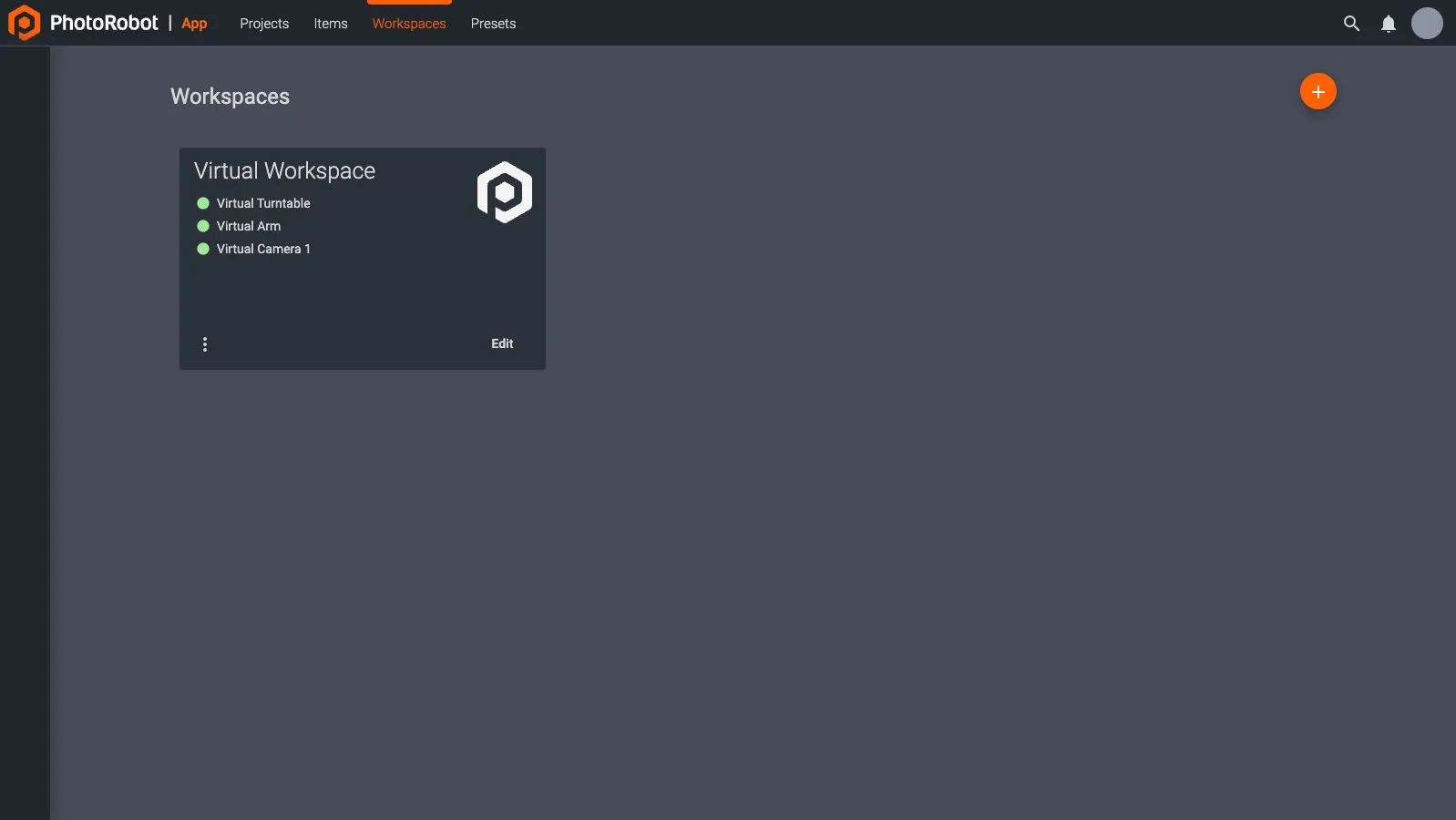
När du har öppnat CAPP är det vanligtvis det första en användare gör att skapa en arbetsyta. En arbetsyta är en lista över maskinvara som används för en viss fotografering. Den kan innehålla olika PhotoRobot moduler, kameror, lampor och andra tillbehör.
I demosyfte kan användare arbeta med en fördefinierad exempelarbetsyta, som är konfigurerad för att använda virtuell maskinvara. På detta sätt kan användare fortfarande experimentera med olika funktioner i CAPP genom att välja virtuella robotar och kameror.
Ansluta maskinvara
För att börja använda faktisk (i motsats till virtuell) hårdvara, se först till att hårdvaran är ansluten till samma datornätverk (eller ett undernätverk) som den dator du använder för att styra din PhotoRobot.
Obs: Från och med PhotoRobot Controls version 2.5.4 kan alla kameror nu stödjas genom integrering av tredjepartskameror. Samtidigt inkluderar kompatibla kameror en rad Canon-kameramodeller, våra rekommenderade Wi-Fi-aktiverade Canon-kameror, och även iPhone-kameror om PhotoRobot Touch App används.
Viktigt: För automatiserad fotografering med ROBOTIC arbetsstation är de PhotoRobot-rekommenderade spegellösa Canon-kameramodellerna de mest tillförlitliga. Även om det finns stöd för handhållna kameror via Wi-Fi eller kabelanslutning, kan deras användning skapa problem. Dessa inkluderar frekventa Wi-Fi-frånkopplingar (främst på grund av timeout), komplikationer med kabellängder och risk för anslutningar.
För att ansluta en kamera måste den vara ansluten till samma lokala datornätverk som roboten på ett av tre sätt:
- Direkt anslutning via USB till det lokala nätverket;
- Anslutning av en rekommenderad handhållen kamera via ett särskilt Wi-Fi-protokoll (tillgängligt i Canons verktygsprogram på Canons framkallningssida);
- Integrering av en eller flera iPhones via PhotoRobot Touch-applikationen. (Anvisningar om hur du använder en iPhone med PhotoRobot finns i användarhandboken för iPhone Touch App.)
Efter att ha anslutit en hårdvara (eller kamera) till en arbetsyta kan du sedan kontrollera om den är online (igenkänd av CAPP). För att göra detta, inspektera punkten till vänster om namnet på den aktuella utrustningen. Om enheten känns igen kommer det att finnas en grön punkt.
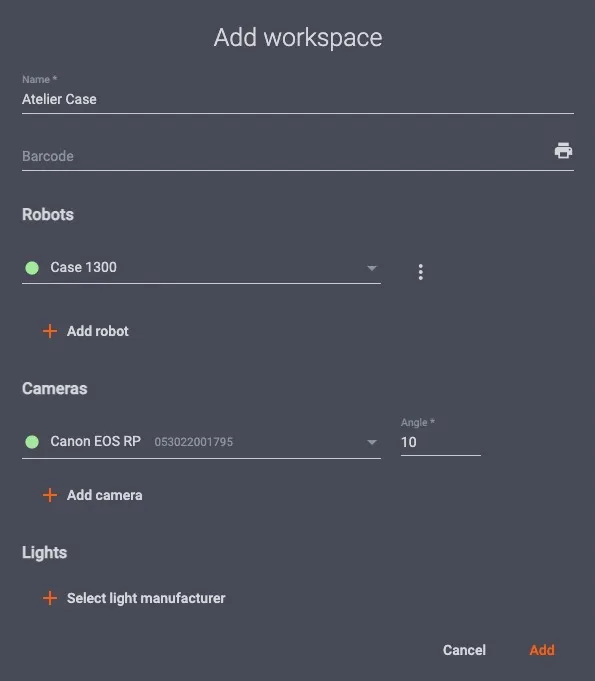
En grå punkt bredvid enhetens namn signalerar att hårdvaran inte känns igen eller inte är påslagen. Om det finns en röd punkt, finns det ett fel, till exempel att användaren inte har växlat kameran till manuellt läge. För att identifiera orsaken till felet, håll muspekaren över den röda punkten för att visa en verktygstips med en beskrivning av felet som uppstår.
För en komplett steg-för-steg-guide om hur du ansluter hårdvara för att ställa in en arbetsyta, se Ställa in en PhotoRobot-arbetsyta.
Om du upplever problem, se PhotoRobot Felsökning för vanliga problem och deras lösningar.
Inställning av robotarmens höjd
Om du använder en robotarm på arbetsplatsen, observera att det troligen kommer att krävas ytterligare inställningar. Detta beror på att robotarmen är en oberoende maskin, och en av funktionerna för att styra den via CAPP är att höjdrörelsen riktar in rotationsaxeln mot mittpunkten för det fotograferade objektets höjd.
Höjden på robotarmens rotationsaxel bestäms av arbetsstationens maskintyp och samtidigt av justeringen av nivelleringsfötterna, som kompenserar för eventuella ojämnheter i golvet. Om allt är korrekt inställt är maskinen jämn och rotationscentret är på en viss höjd över golvet. Den totala höjden kommer dock också att bero på höjden på skivspelarens yta, som varierar mellan olika robotar. Detta innebär att det kan finnas en diskrepans i höjdreferensen, eftersom det finns en höjdadapter under robotarmens pelare så att den i stort sett är i linje.
För att säkerställa perfekt inriktning blir det sedan nödvändigt att ange höjdskillnaden mellan armen och skivspelaren i CAPP. Höjdskillnaden mäter det exakta avståndet mellan robotarmens rotationsaxel och den höjd på vilken skivspelarens yta är placerad (inklusive eventuella extra brädor placerade ovanpå den). Detta ger de exakta måtten från vilka systemet beräknar hälften av objektets höjd, och den position där armen ska röra sig. Det säkerställer också att systemet är inställt på att fungera automatiskt och korrekt.
Notera också: Systemet är inställt på att avvisa värden som ligger utanför det giltiga intervallet för en viss inställning.
Ställ in ROBOTIC ARM Elevator till nollnivå
För att ställa in Robotarmens hiss till nollnivå, öppna först den lokala versionen av CAPP och öppna Arbetsyteinställningar på ett av två sätt:
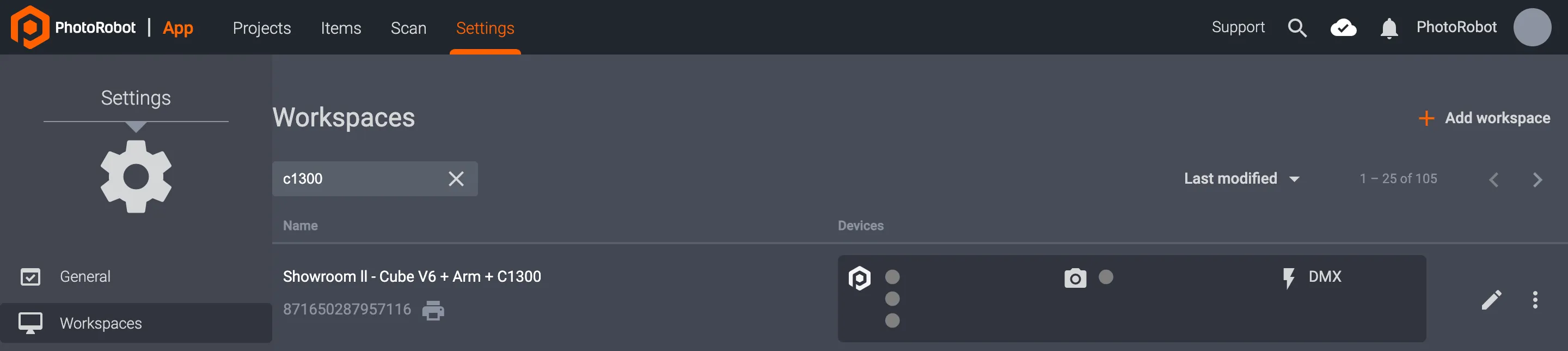
1. Öppna den lokala versionen av CAPP, klicka på Inställningar högst upp i gränssnittet och välj Arbetsytor från de vänstra menyalternativen. I den här menyn, hitta arbetsytan i drift och klicka på redigeringsikonen bredvid arbetsytans titel för att öppna inställningarna för Redigera arbetsyta:
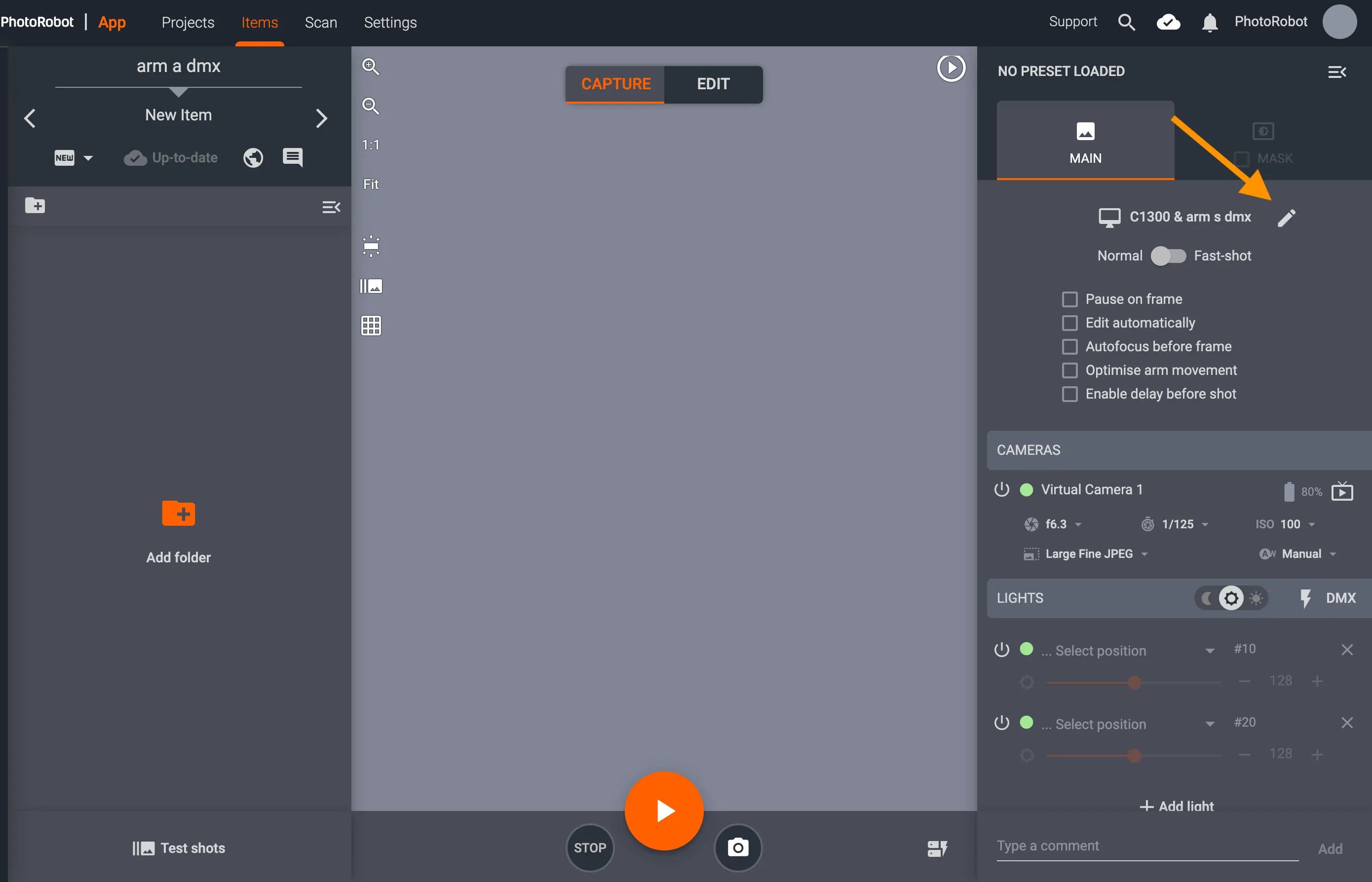
2. Alternativt är det möjligt att komma åt menyn Redigera arbetsyta genom att öppna ett objekt i inspelningsläge i den lokala versionen av CAPP och sedan klicka på redigeringsikonen bredvid arbetsytans titel till höger i gränssnittet:
Båda metoderna öppnar inställningarna för arbetsytan Redigera. Sedan, för att konfigurera robotarmen, hitta enheten under Robots-menyn och klicka på de 3 vertikala prickarna bredvid robotarmens namn.
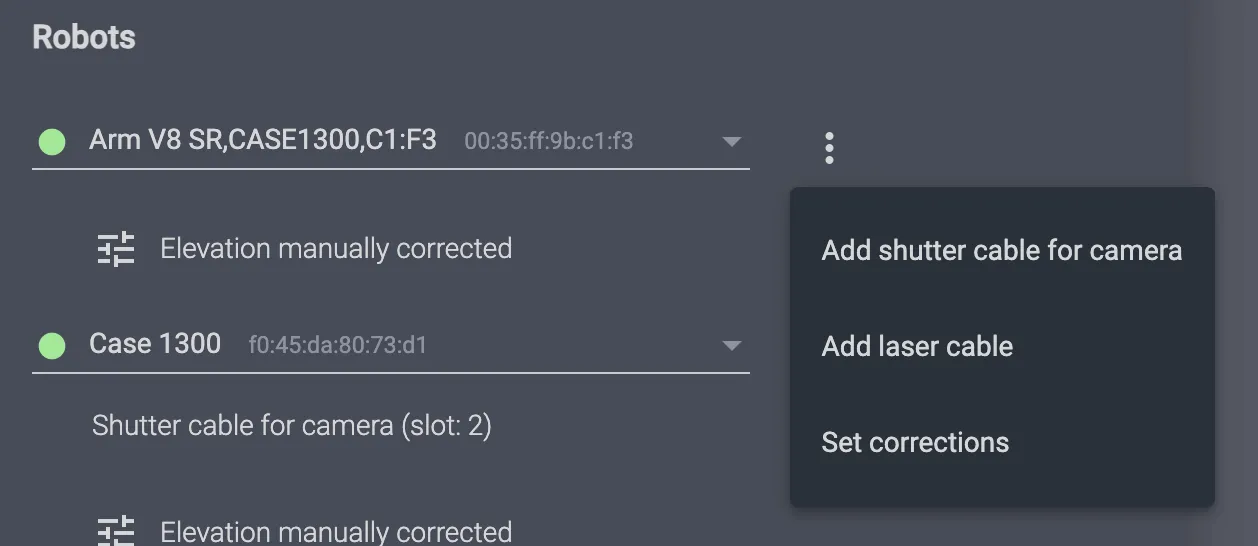
Välj sedan menyalternativet Ställ in korrigeringar för att öppna funktionen Ställ in hisskorrigering :
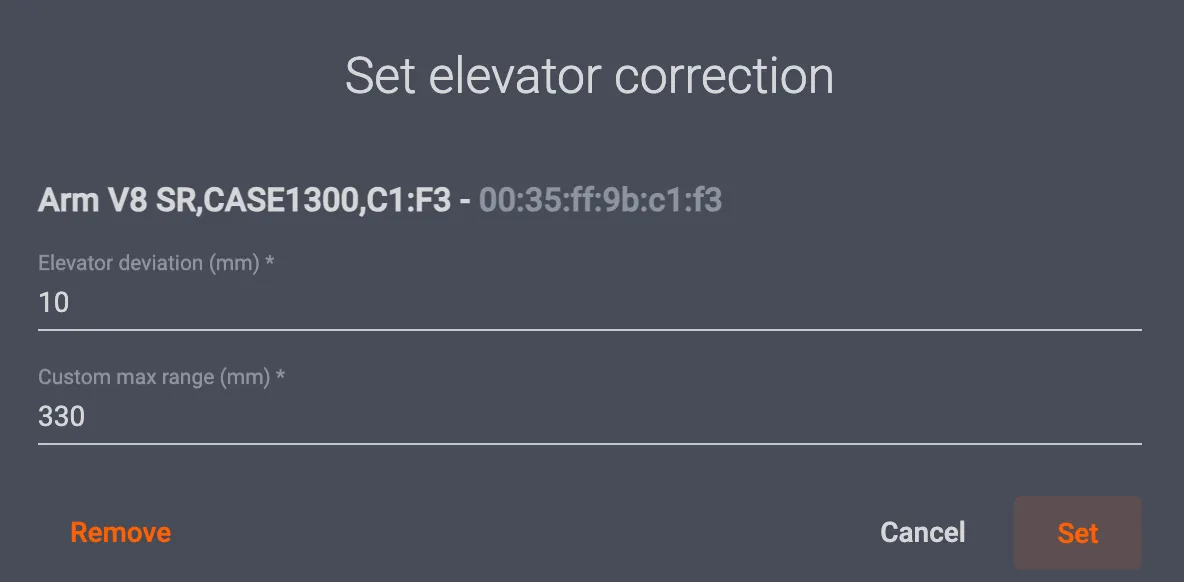
I menyn Ställ in höjdkorrigering justerar du siffran i det översta fältet Hissavvikelse (mm) för att ställa in kamerans höjd till lämplig nollnivå. Om kameran till exempel är 10 mm ovanför bordet ställer du in Höjdjusteringsavvikelse på -10 mm för att centrera kameran.
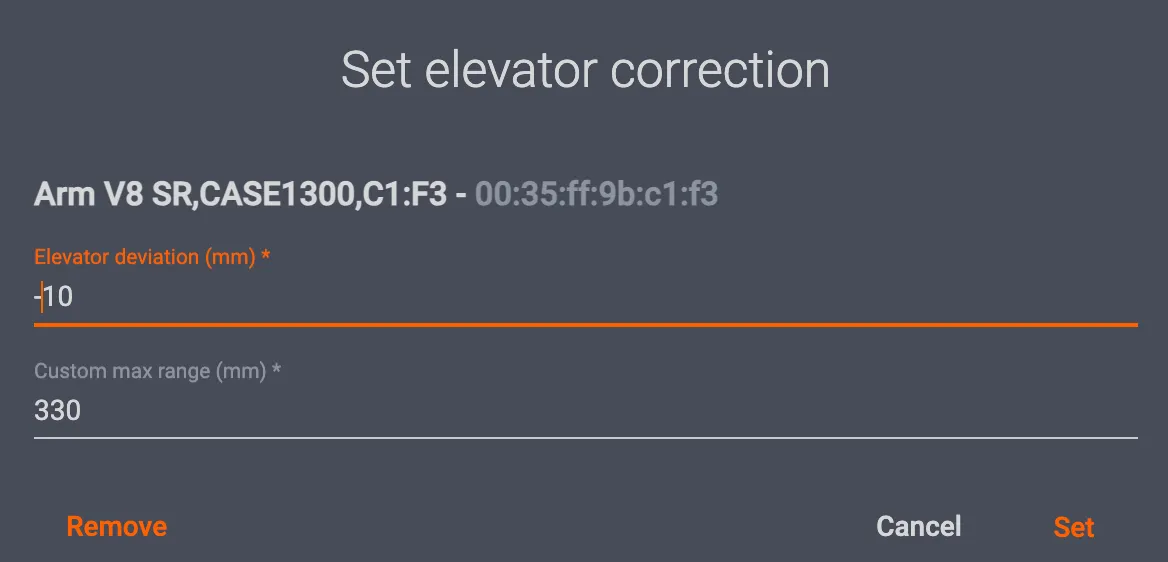
Om kameran är 10 mm fel centrerad under tabellen ställer du in Hissavvikelse på +10 mm. Detta kommer att rikta in höjden på den monterade kameran på robotarmen korrekt till lämplig nollnivå i programvaran.
Not: Lyften kan nå maximalt 330 mm. Således, om man justerar nollnivån med +30 mm, kan den maximala lyften bara nå 300 mm. Det innebär att systemet bara kommer att kunna fånga upp produkter som är mindre med denna marginal, 30 mm eller mindre.
Hantera filer – projekt, objekt och mappar
I CAPP är bilderna ordnade i projekt, objekt och mappar.
- Ett projekt är den högsta dataentiteten. Vanligtvis innehåller ett projekt objekt från en enda fotografering eller kanske en enda fotograferingsdag / vecka.
- Projekten består av en eller flera objekt. Ett enskilt objekt är vanligtvis ett specifikt, fotograferat objekt.
- Ett objekt innehåller en eller flera mappar. I CAPP kan du ha flera mappar i ett enda objekt för att hålla olika typer av bilder åtskilda. Ett mycket vanligt exempel är att ha en mapp för en 360° roterande presentation (kallad "spin"), medan du använder en annan för att lagra stillbilder ("stillbilder").
För att börja fotografera måste du först lägga till ett nytt projekt (om du inte redan har ett som du vill använda), samt minst ett objekt.
( ! ) - Om du har problem hittar du ytterligare stöd för att ansluta kameror, robotar, lampor och redigering i PhotoRobot Troubleshooting Manual.
Allmänna inställningar - Automatisk säkerhetskopiering i molnet, bearbetning, pekapp
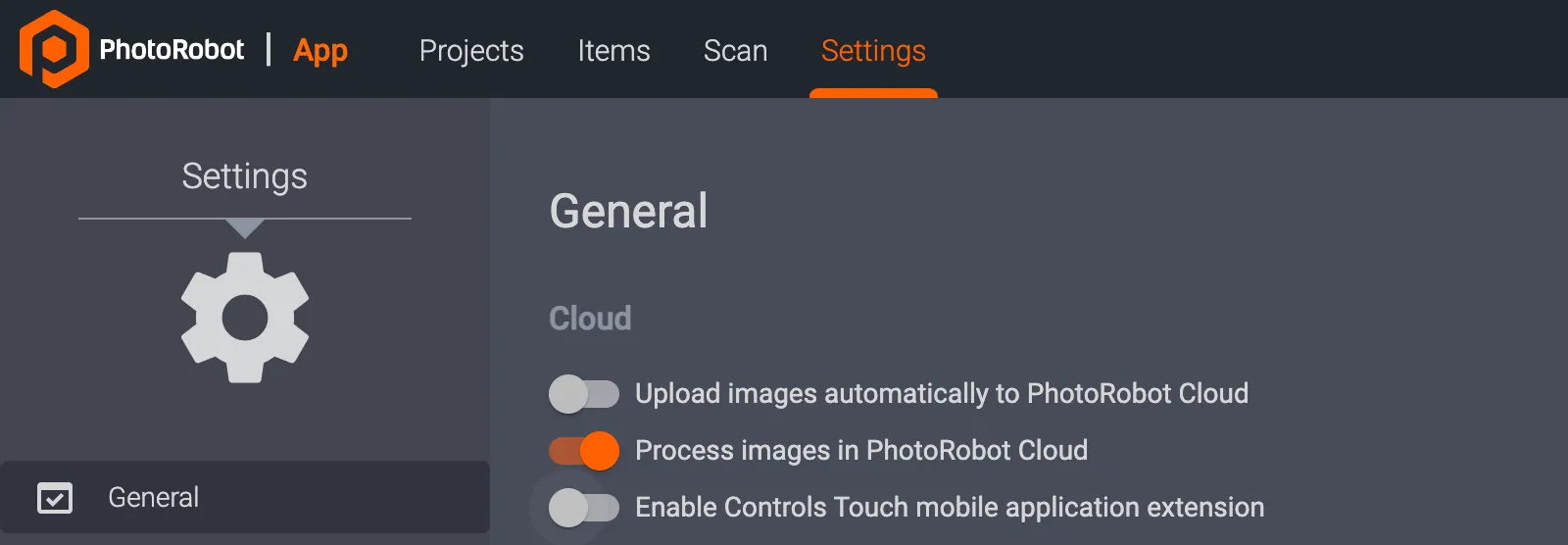
I den lokala skrivbordsversionen av CAPP finns det 3 allmänna inställningar att slå på eller av:
- Ladda upp bilder automatiskt till PhotoRobot Cloud
- Bearbeta bilder i PhotoRobot Cloud
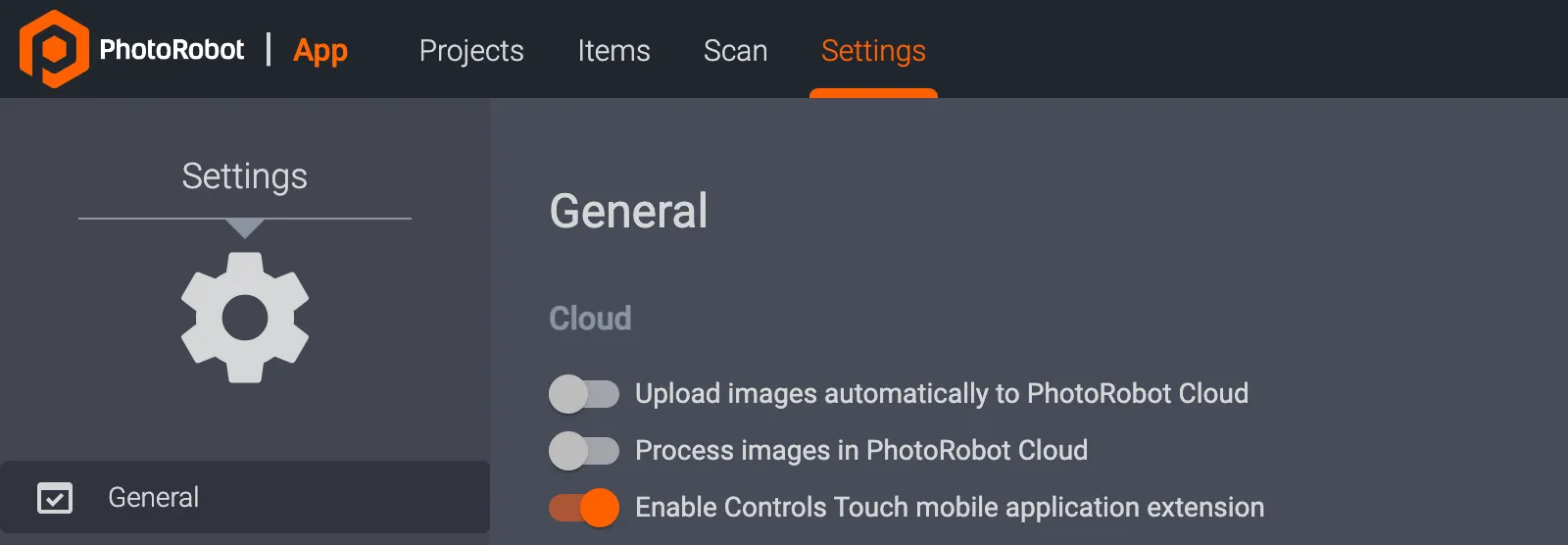
- Aktivera kontroller Tryck på Tillägg för mobilapp
Som standard kommer den lokala appen att vara inställd på Ladda upp bilder automatiskt till PhotoRobot Cloud. Den här funktionen sparar automatiskt en säkerhetskopia av tagna bilder till din molnserver för senare export.
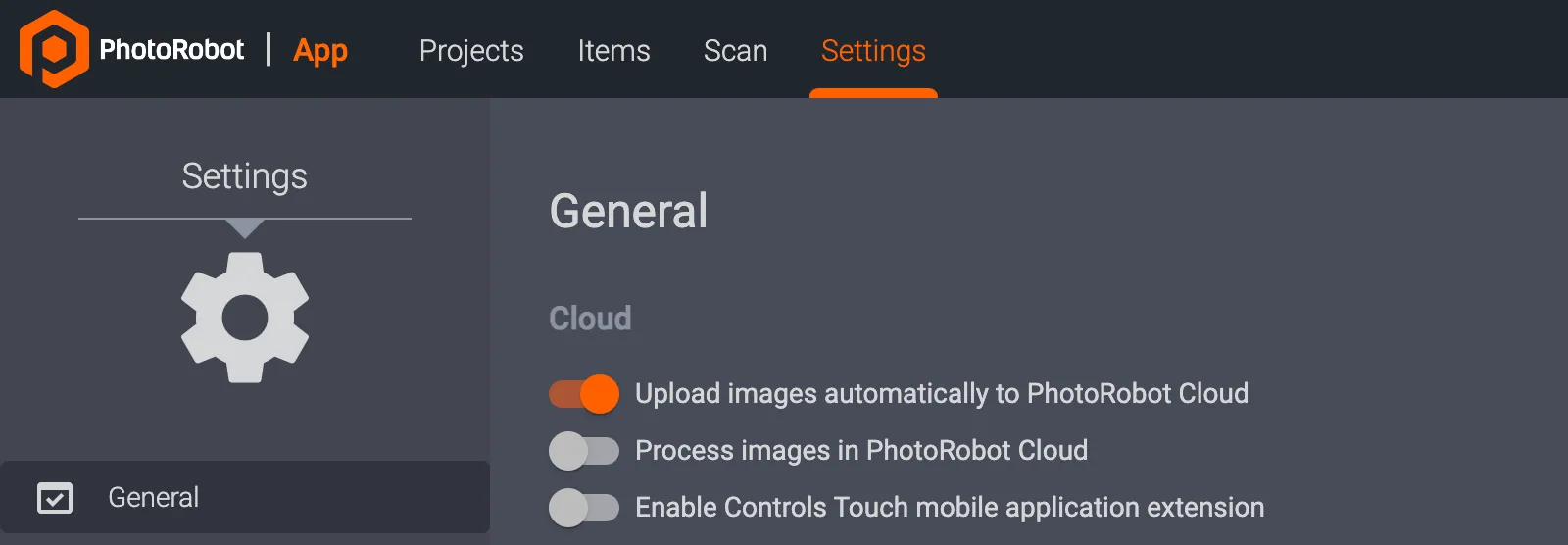
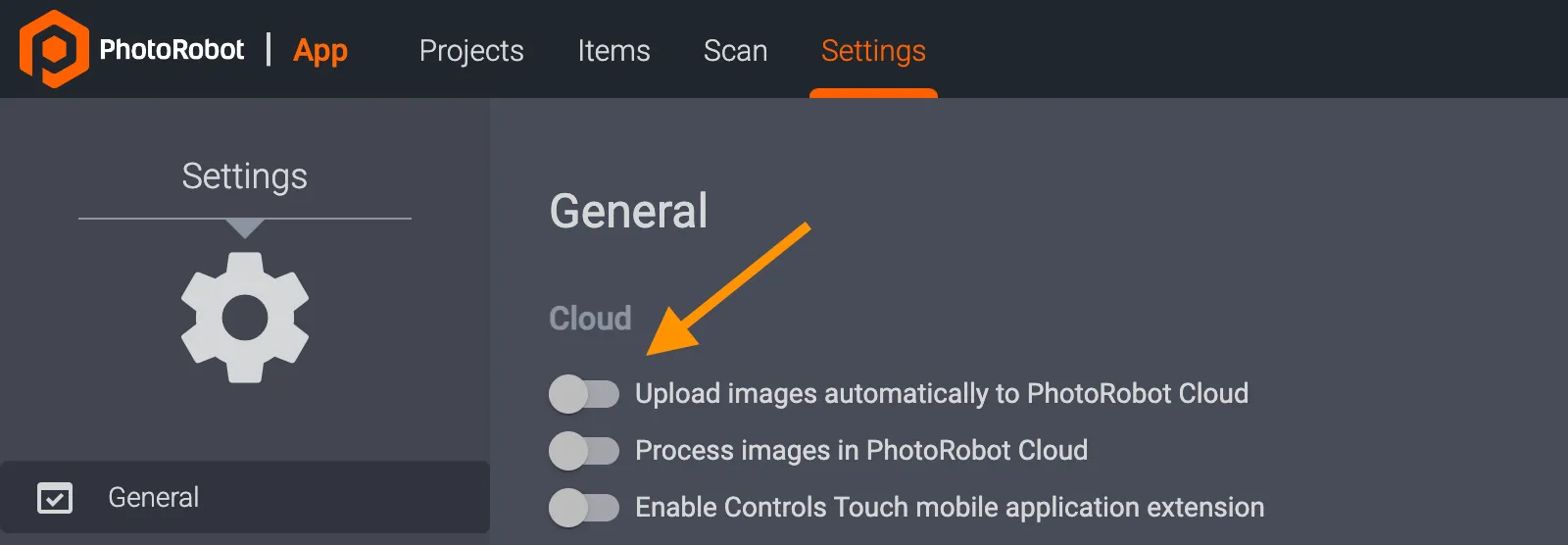
För att inaktivera Ladda upp bilder automatiskt till PhotoRobot Cloud, stäng av alternativet i den lokala versionen av CAPP:s allmänna inställningar. Detta kommer istället att spara fångade objekt till din lokala app eller till ditt eget molnkonto.
Använd reglagen också för att aktivera eller inaktivera funktionen Bearbeta bilder i PhotoRobot Cloud. När den är på efterbehandlar den här funktionen automatiskt bilder enligt förinställningar i PhotoRobot Cloud efter att de har tagits.
Om du använder PhotoRobot Touch Mobile Application för iPhone, slå på Aktivera kontroller Touch Mobile Application Extension.
Not: För tekniska instruktioner om installation och drift av PhotoRobot Touch, se användarhandboken för PhotoRobot iPhone Touch App.
Allmänna inställningar - Skapa automatiskt nytt objekt
Dessutom, i de allmänna inställningarna i den lokala skrivbordsversionen av CAPP, finns inställningarna för streckkodsläsare som möjliggör konfiguration av avancerade alternativ för streckkodsläsaren. Använd reglaget till vänster om Skapa automatiskt ett nytt objekt i systemet när en okänd streckkod skannas för att aktivera eller inaktivera automatiskt skapande av objekt.
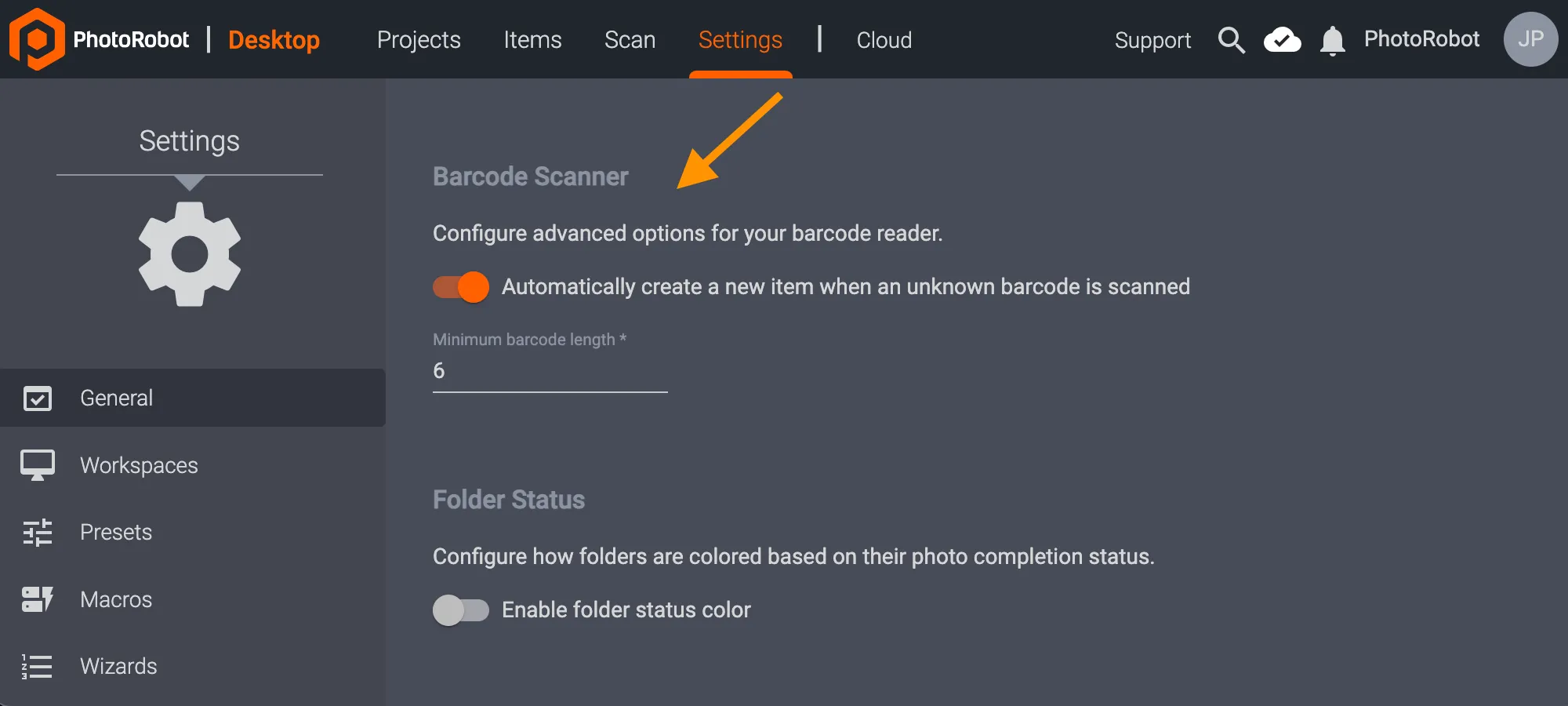
När den är aktiv kommer inställningen att fungera som ett alternativ till manuell skapande av objekt. Det gör det möjligt att identifiera ett föremål vid fångstpunkten (vanligtvis via streckkod eller QR-kod). En operatör skannar helt enkelt en okänd kod och ett nytt objekt skapas automatiskt i projektet. Objektets namngivning kommer att ske enligt den skannade strängen och i objektets identifierarfält. Sedan fotograferar operatören föremålet.
På så sätt finns det inget behov av att utföra några inventeringsrelaterade operationer i studioprogramvaran. Det räcker till exempel att skanna ett nytt objekt och sedan skanna en förinställd (hyll) kod för fotograferingen (t.ex. för vita, mörka eller färgglada föremål). Systemet kommer sedan automatiskt och omedelbart att leverera en komplett uppsättning fotografier, efterbehandla dem fullständigt och distribuera dem med automatisk namngivning till målsystemet.
Från och med CAPP-version 2.13.beta58 finns det nu möjlighet att konfigurera den minsta stränglängden för streckkoder. Tidigare var den minsta längden på streckkoden / QR-koden 6 tecken (bland annat för att undvika dubbla tolkningar av den skannade strängen). Nu är inställningen Minsta streckkodslängd justerbar så att till exempel identifierare med fyra tecken kan fungera utan behov av ytterligare justeringar.
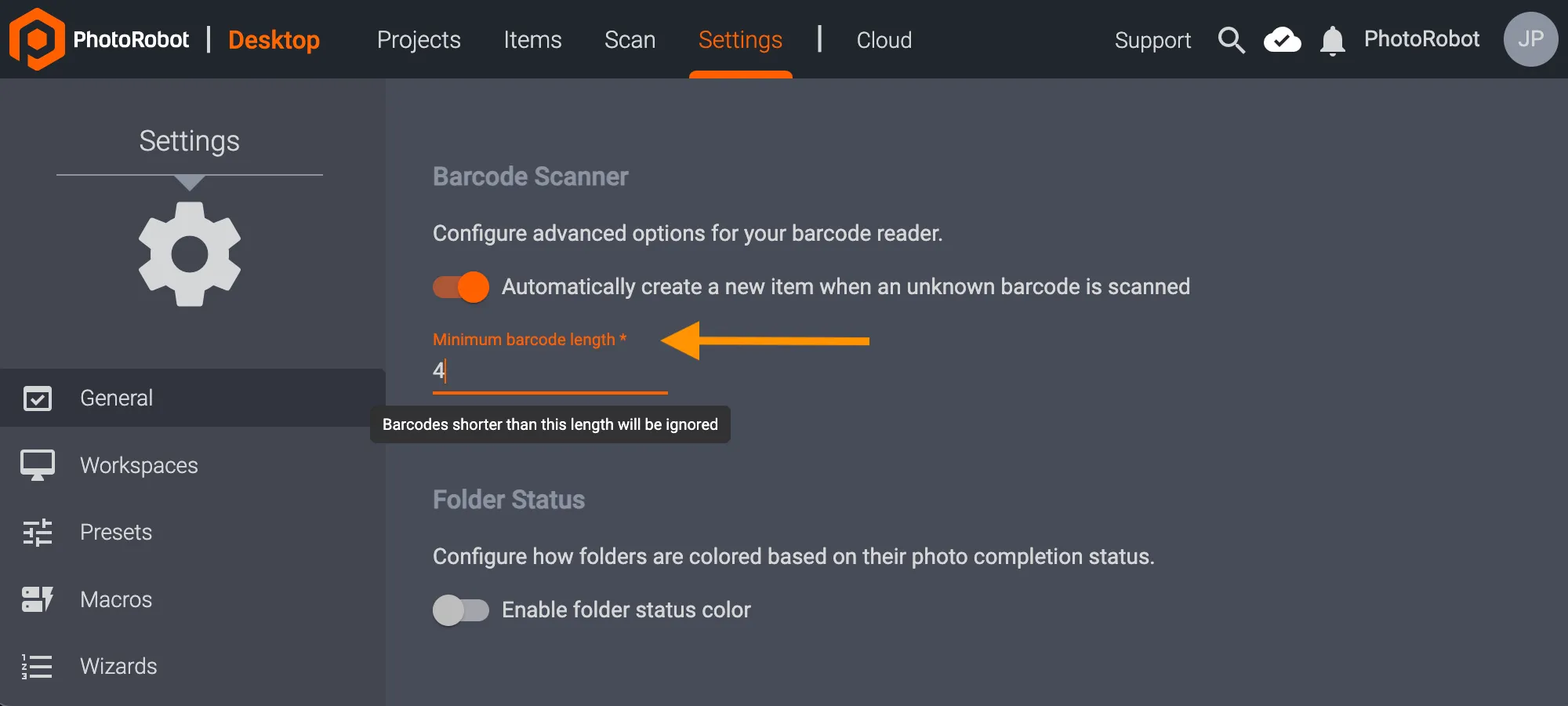
För att justera den minsta stränglängden för streckkoder / QR-koder, konfigurera Minsta streckkodslängd även i den lokala versionen av CAPP i Allmänna inställningar - Streckkodsläsare. Streckkoder som är kortare än den inmatade längden kommer då att ignoreras av systemet.
Not: Efter att ett objekt har tilldelats en streckkod i systemet kommer streckkoden också att vara tillgänglig direkt i fångstlägesgränssnittet i området för artikelinformation via en streckkodsknapp.
Bevilja kund extern åtkomst till projektdata
Om du vill arbeta med kunder utanför organisationen för ett betalt CAPP-konto kan en administratör för kontot skapa kundkonton utan kostnad. Kundkonton gör det möjligt för en extern kund att se projektdata, delta i kvalitetssäkring genom granskning och kommentarer och få tillgång till projekttillgångar för nedladdning. Den här funktionen är avsedd för situationer där en fotostudio arbetar med en extern kund som behöver åtkomst till specifika jobb.
För att kunna dela ett projekt med en kund utanför din organisation måste du först se till att du loggar in på molnversionen av CAPP med en användarprofil med administratörsbehörighet.
1. Logga in på den molnbaserade appen med en betald CAPP-kontoprofil med administratörsbehörighet och klicka på menyikonen för användarprofilen i det övre högra hörnet av instrumentpanelen. Klicka sedan på Organisation för att komma åt administrationspanelen.
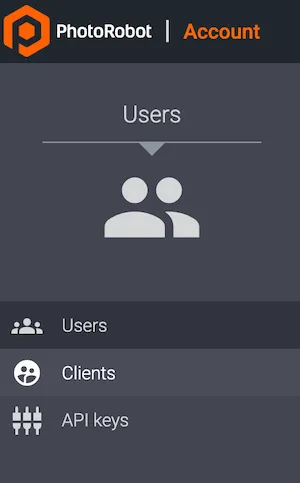
2. Klicka sedan på Användare från kontoalternativen högst upp i användargränssnittet från panelen Organisationsadministration.

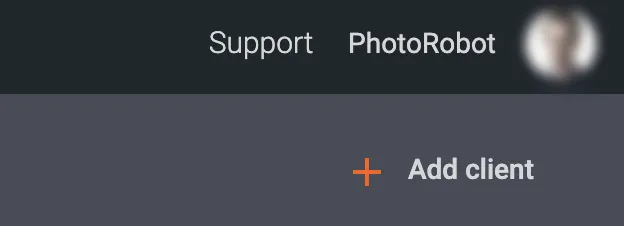
3. Klicka på Klienter för att skapa ett nytt användaralternativ för att komma åt funktionen Lägg till klienter från kontogränssnittet. Knappen + Lägg till klienter visas längst upp till höger på instrumentpanelen under användarprofilikonen.
4. Klicka på + Lägg till klient under användarprofilikonen.
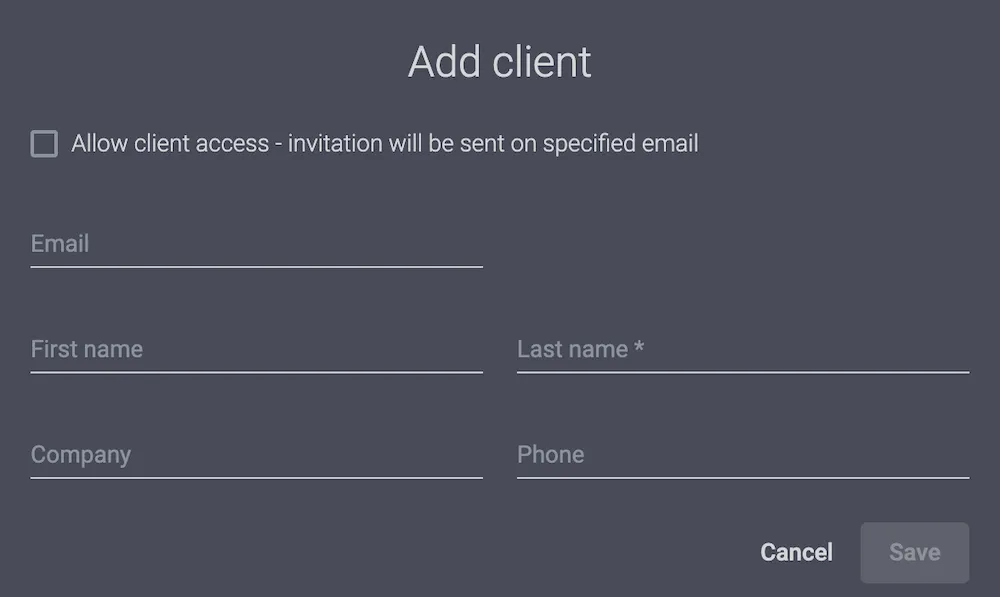
5. Fyll i fälten för kundens information (e-post, namn, företag, telefon) och markera rutan Tillåt klientåtkomst. Granska informationen för att se till att den är korrekt och klicka på Spara för att lägga till klienten i CAPP.
6. Öppna Projekt i molnversionen av CAPP, hitta projektet du vill dela med den sparade klienten, håll musen över projektfältet och klicka på delningsikonen till höger om projektinformationen.
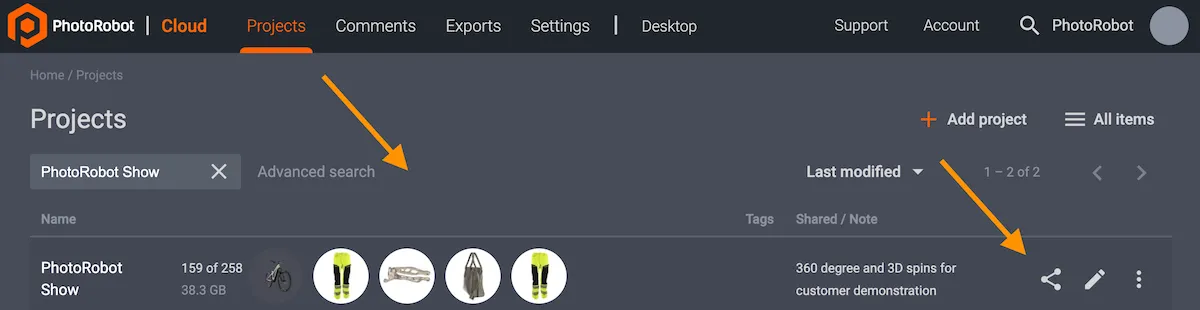
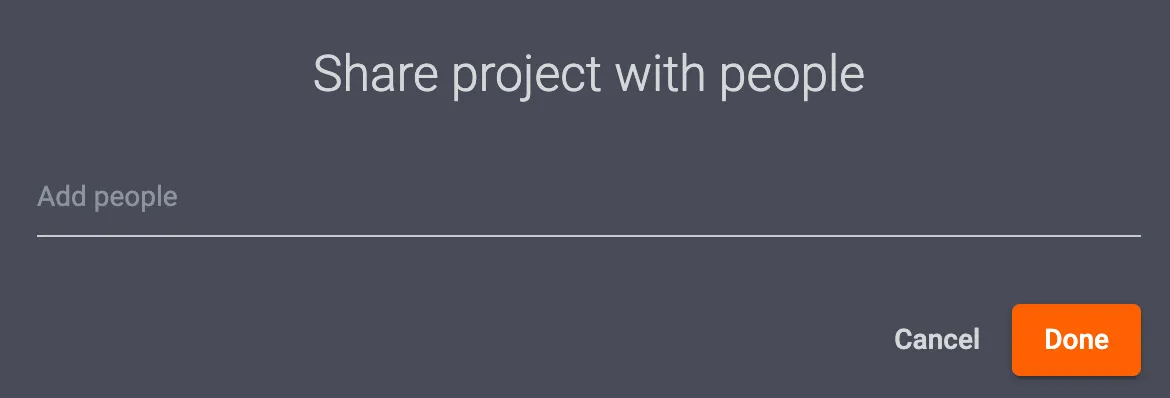
7. Klicka på delningsikonen till höger i projektfältet för att öppna funktionen Dela projekt med personer , välj sparade klienter och klicka på Klar. Projektet delas nu med kunden, vilket gör att de kan se jobbet och kommentera i CAPP för kvalitetssäkring och ytterligare instruktioner vid behov.
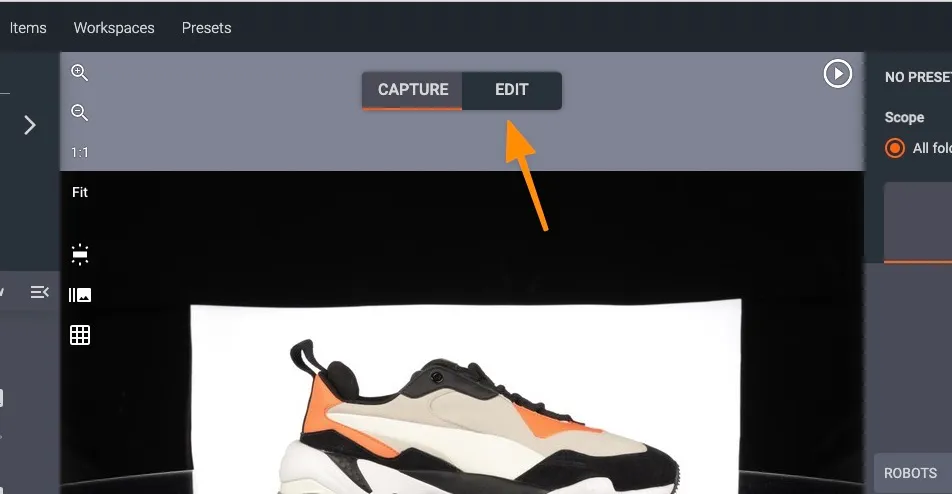
Gränssnitt för inspelningsläge
När du har klickat på ett objekt kommer du till ett insamlings- / redigeringsgränssnitt. De kontroller som du är tillgängliga för ändrar beroende på om inspelningsläget är aktivt eller redigeringsläget . Inspelningsläget används för att styra fotograferingssekvensen, medan redigeringsläget styr all efterbearbetning som utförs inom CAPP. Det aktiva läget markeras högst upp på skärmen:
Lägga till en Snurr-, stillbilds- eller videomapp
Innan du fotograferar måste du skapa minst en mapp. Huvudtyperna av mappar är spinn (används för 360° presentationer), stillbilder (för stillbilder) och video (för videor).
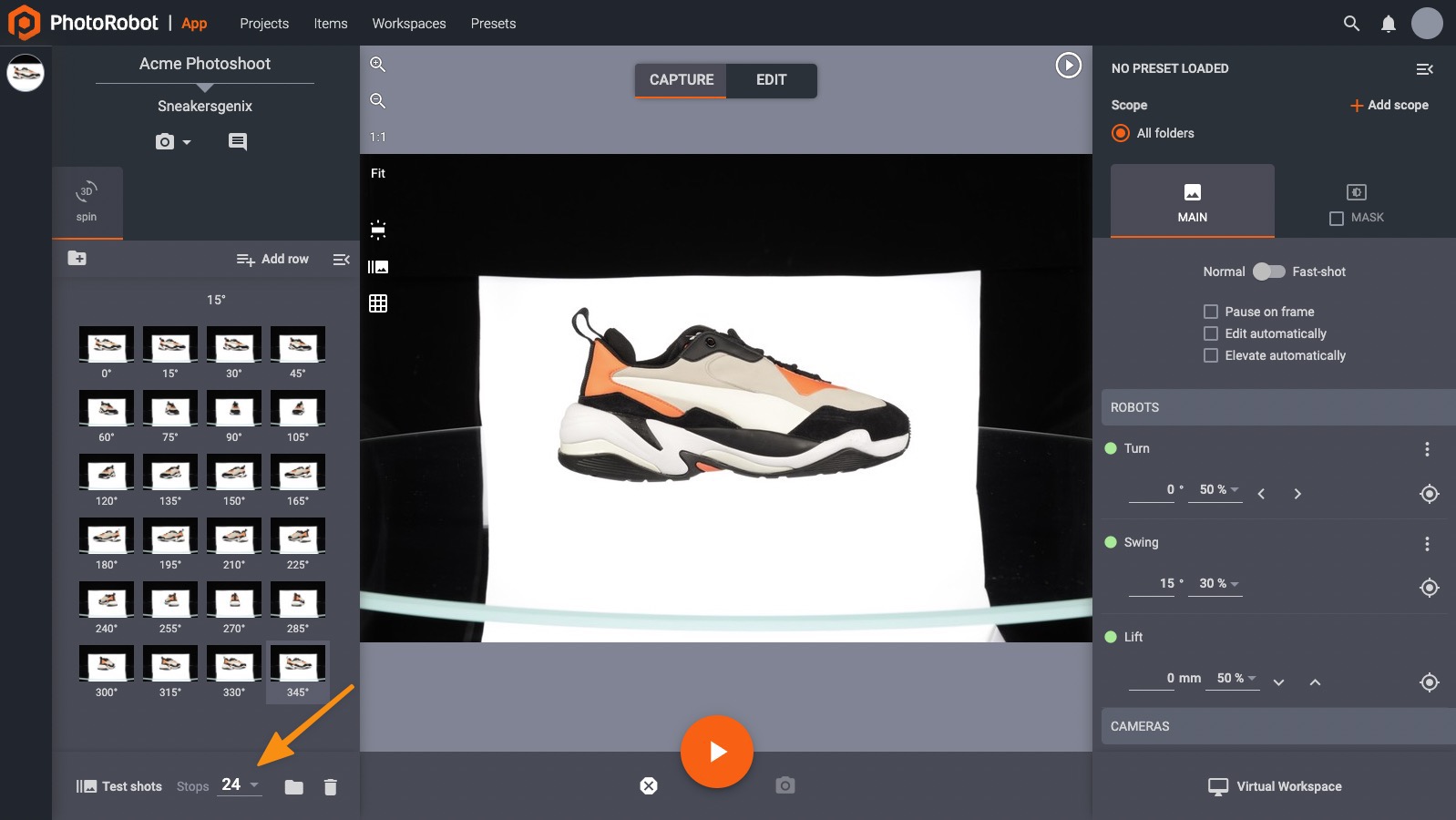
Skapa en Spins-mapp
När du lägger till en spinnmapp lägger CAPP automatiskt till stopp (även kallade "ramar") baserat på hur många bilder per snurr du väljer. Standardnumret är 36, och detta kan ändras i det nedre vänstra hörnet. Med ett högre antal stopp blir rotationen mjukare, men det tar också mer lagringsutrymme.
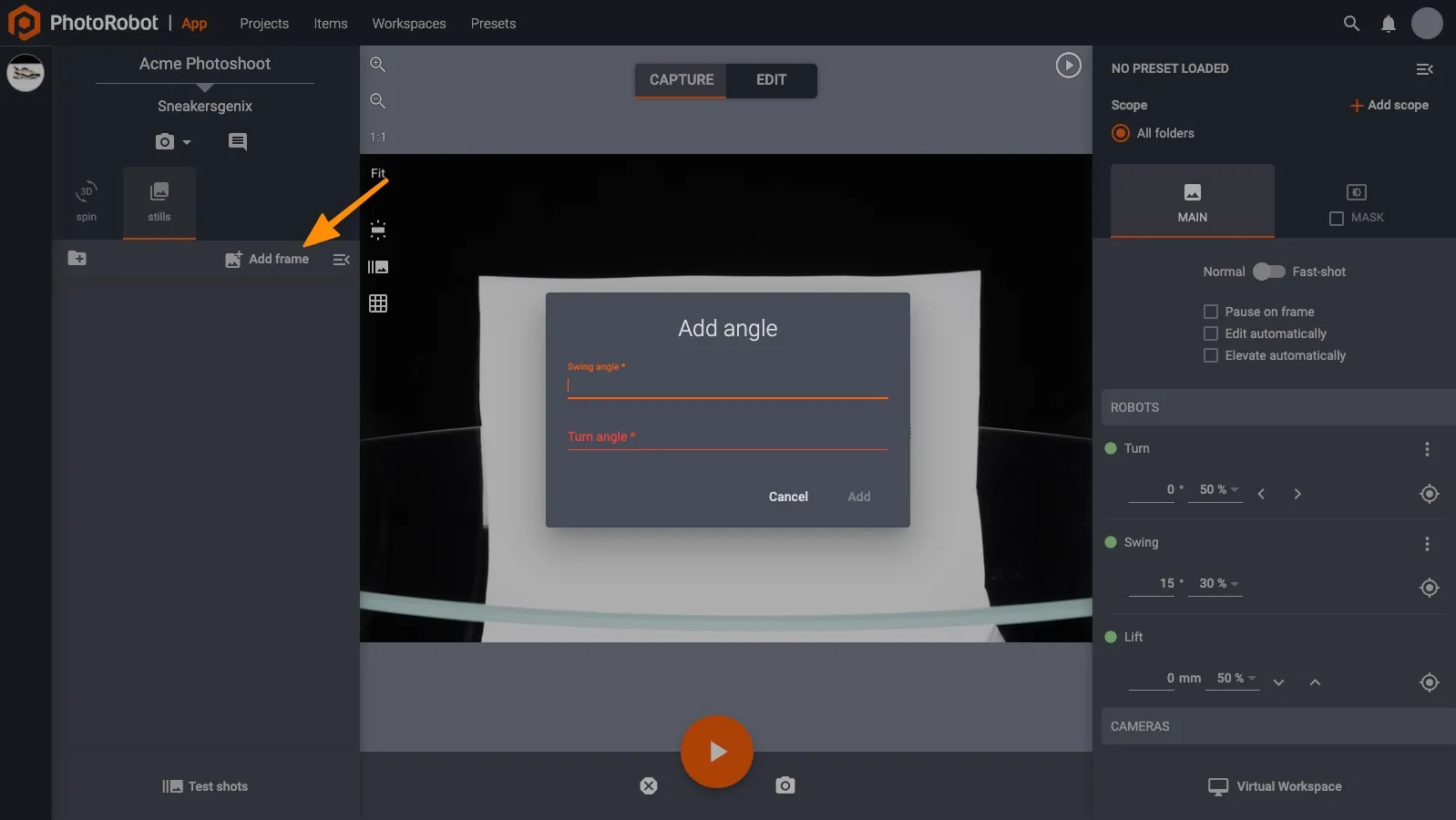
Skapa en stillbildsmapp
Om du väljer en stillbildsmapp måste du lägga till stoppen manuellt. Detta inkluderar en vridvinkel (rotationsvinkeln) och en svängvinkel (kamerans vertikala position längs en cirkulär bana). Svängvinkeln är viktig om du använder vår robotarm eller annan modul som kan ändra kamerans horisontella position.
Importera bilder
I vissa fall kanske du vill importera bilder till en ny eller befintlig mapp i CAPP. Ta till exempel import av handhållna foton, detaljerade bilder eller andra diverse bilder.
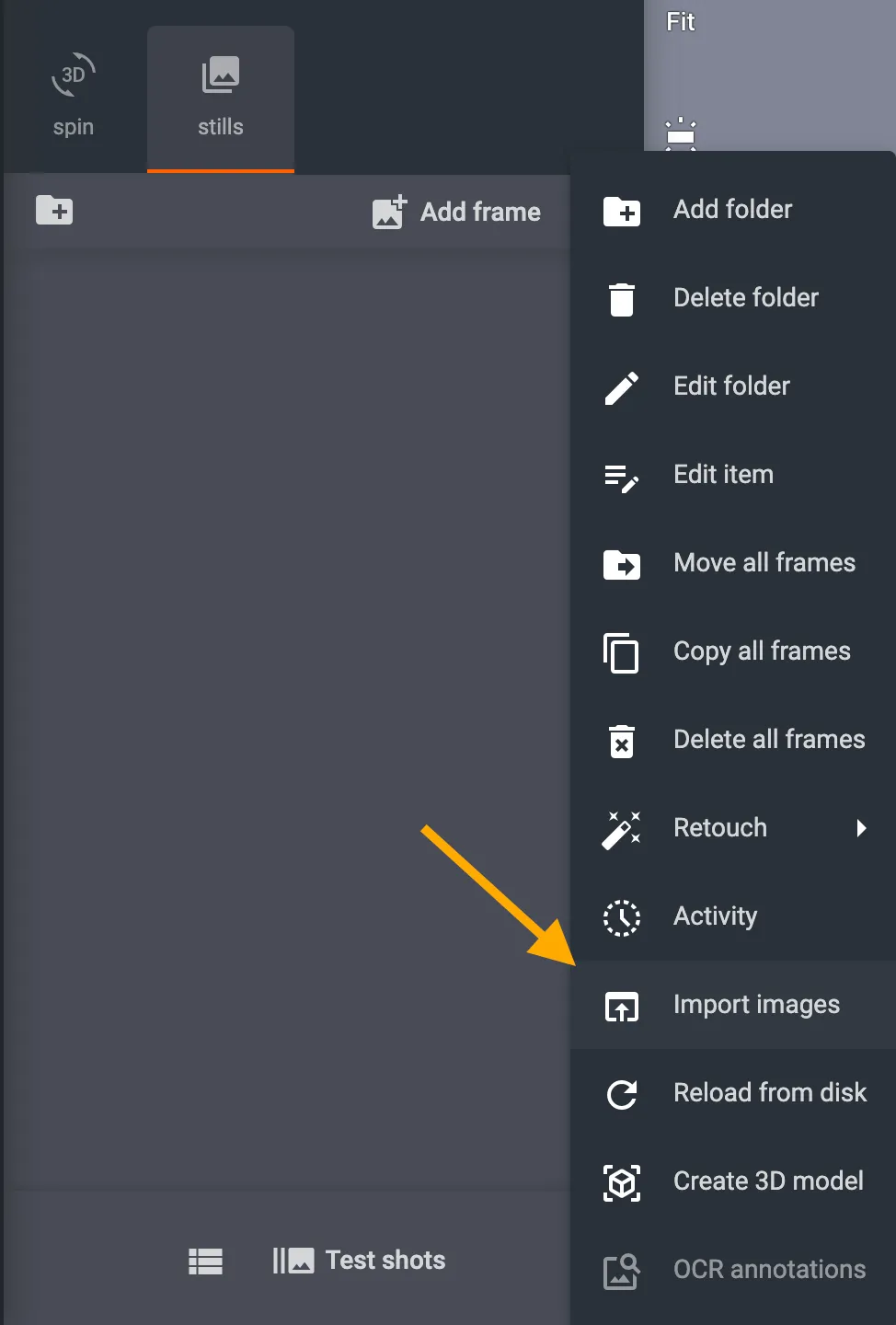
För att importera bilder till CAPP, öppna först ett nytt eller befintligt objekt i gränssnittet för fångstläge i CAPP. Klicka sedan på ikonen för mappoperationsmenyn i det övre högra hörnet av mappgränssnittet.
Sedan, i menyalternativen för mappåtgärder, hitta och klicka på Importera bilder från listan.
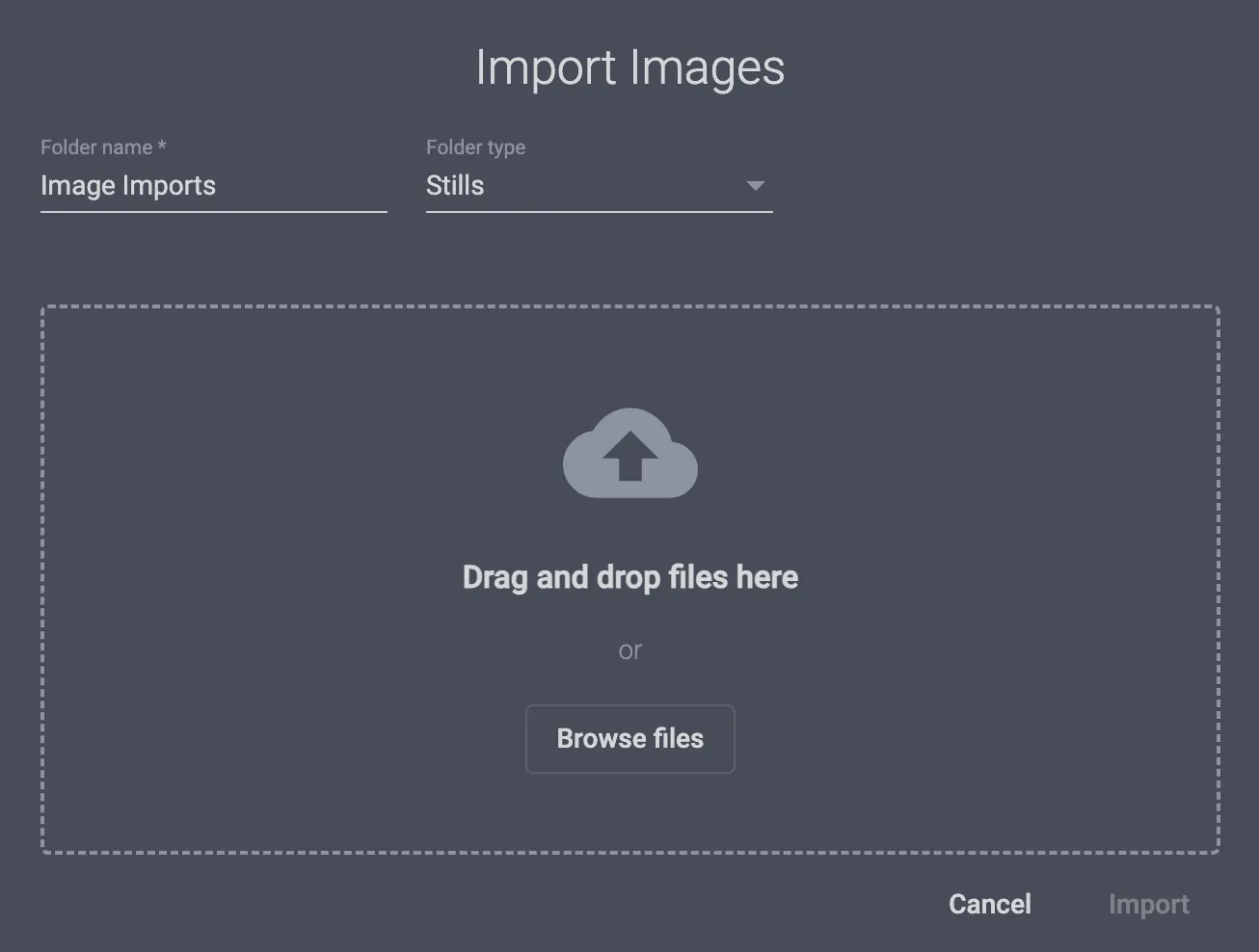
Om du klickar på Importera bilder öppnas ett popup-fönster som aktiverar bildimport genom att dra och släppa eller genom att bläddra bland lokala filer. Högst upp i fönstret är det också möjligt att konfigurera mappnamn och mapptyp för de importerade bilderna.
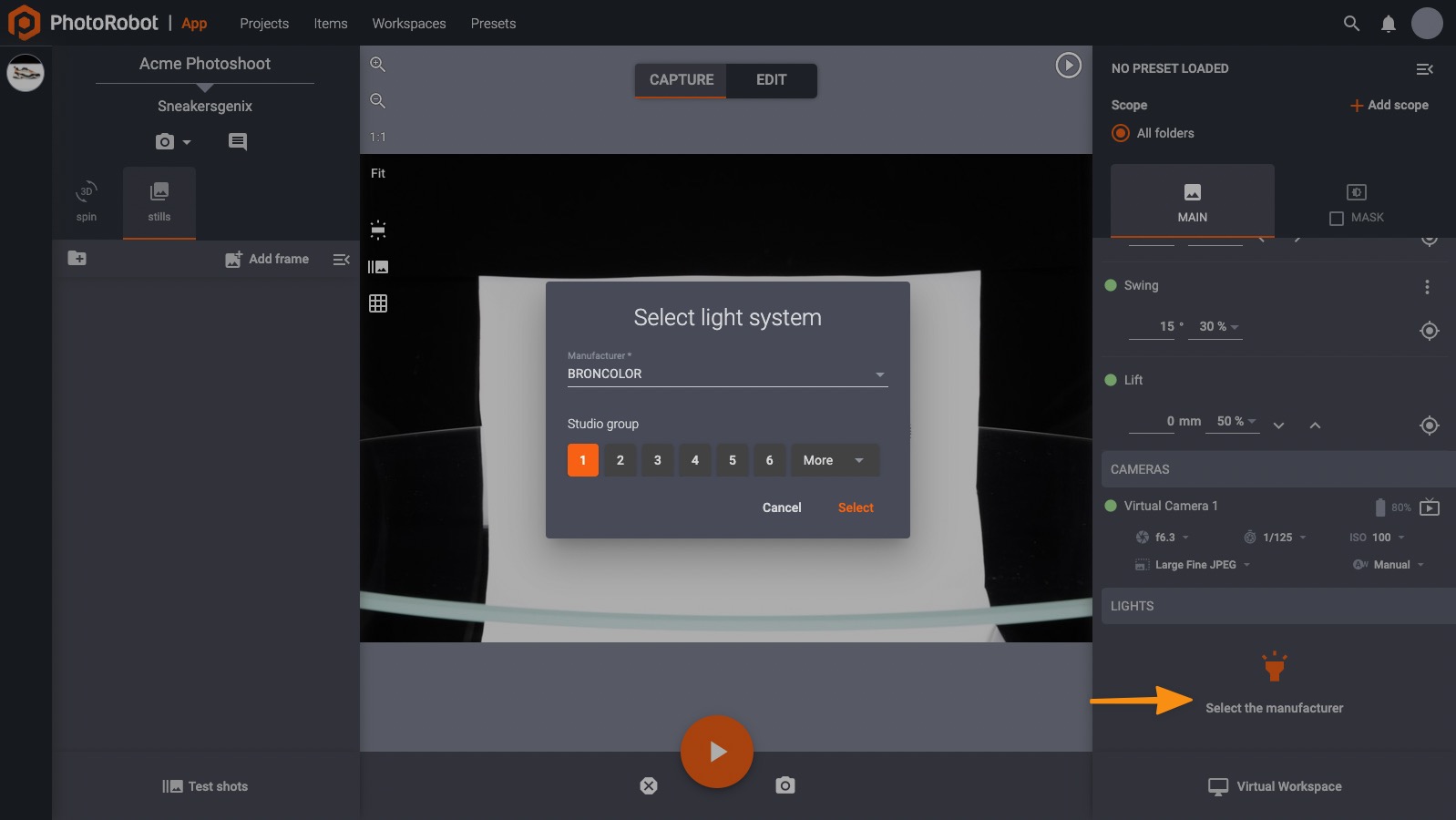
Styr kompatibla lampor
När du använder lampor som är kompatibla med CAPP kan du välja lampor längst ned till höger i redigeringslägesfönstret.
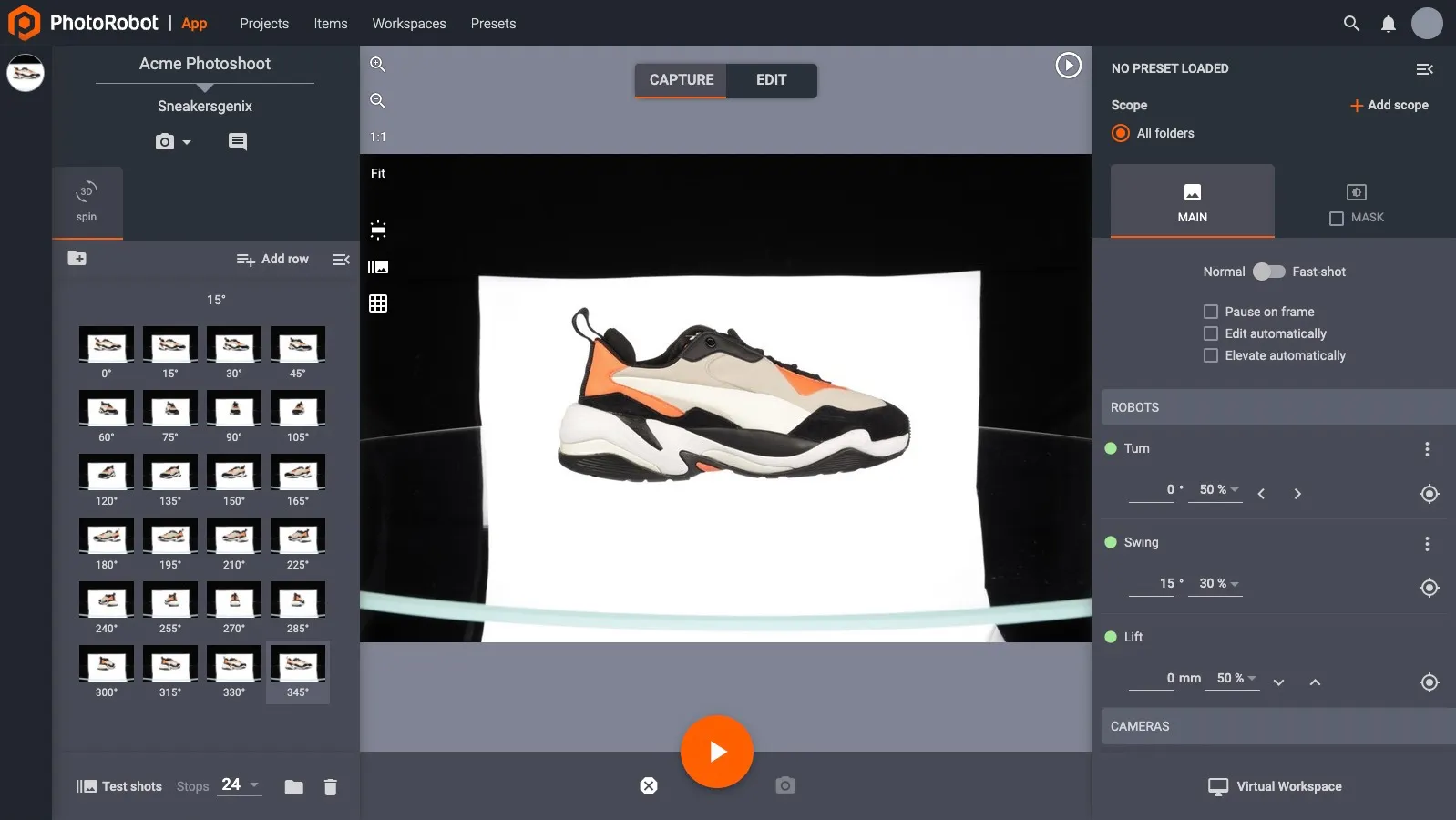
Översikt över gränssnitt för inspelningsläge
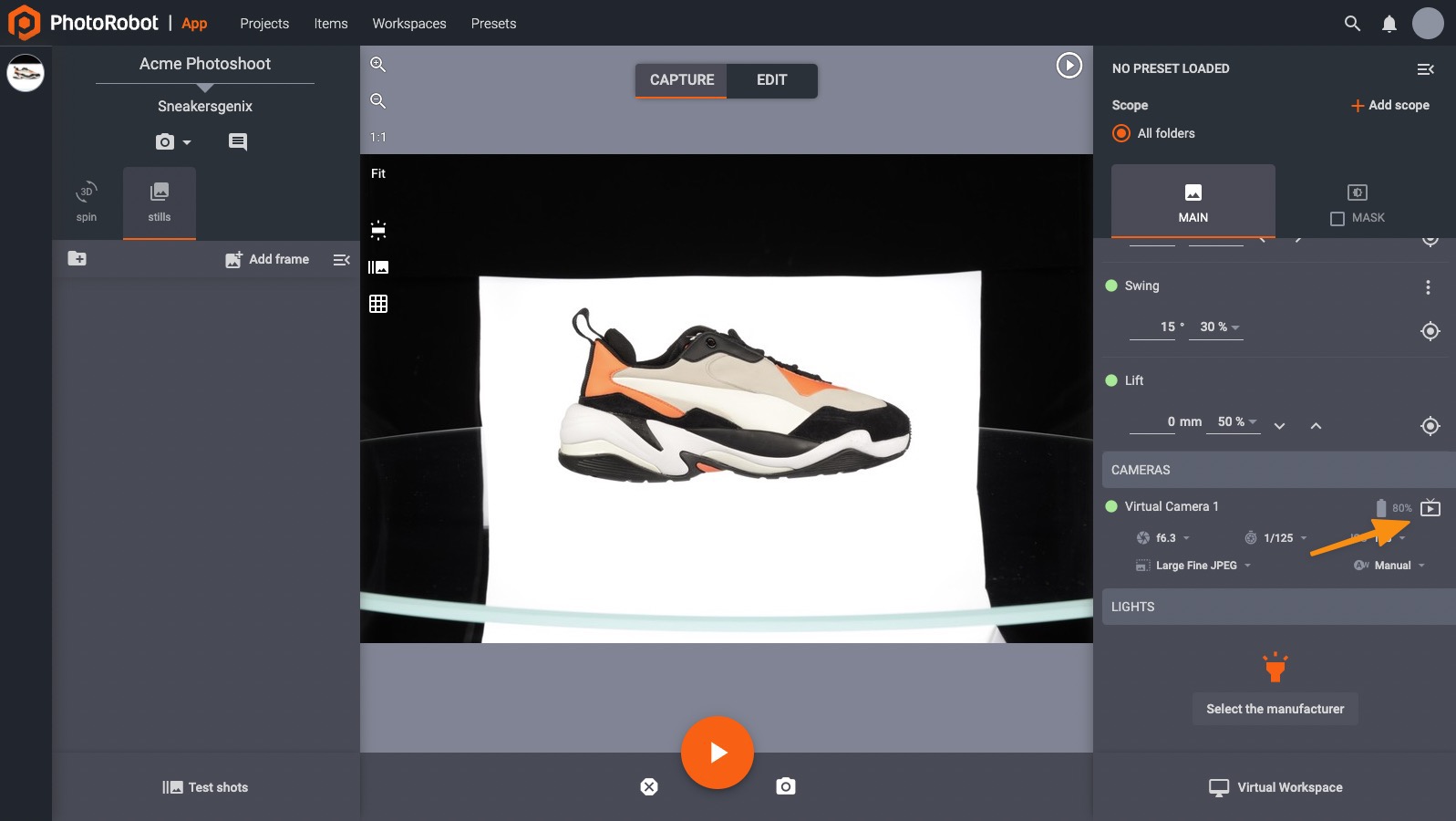
Den centrala delen av gränssnitt för inspelningsläge inkluderar förhandsgranskningsfönstret, som antingen visar den valda bilden (om du redan har tagit några) eller livevisningen som strömmas från kameran.
Live View, som är användbart om du vill kontrollera lugn och fokus, kan växlas i kamerans kontrollområde i den centrala delen av kontrollfältet till höger på skärmen.
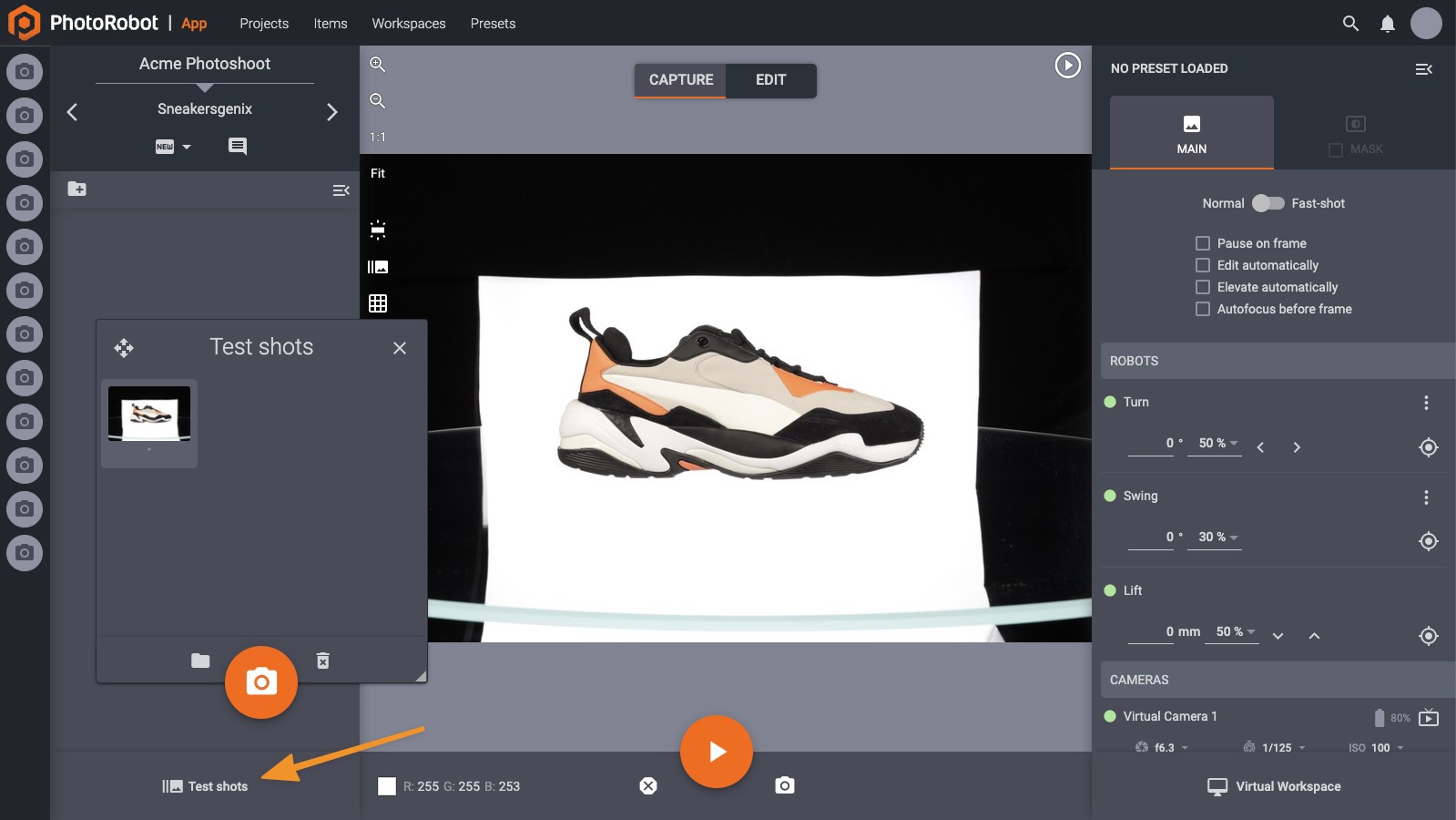
Ta testbilder
Innan du tar slutliga bilder är det en bra idé att ta en eller flera testbilder. Det enklaste sättet att göra detta är att trycka på T-tangenten på datorns tangentbord. Detta hjälper dig att kontrollera om du ska ändra inställningarna för dina lampor, kamera etc. Testbilder lagras i mappen "test shot", som du kan komma åt längst ner till vänster på skärmen.
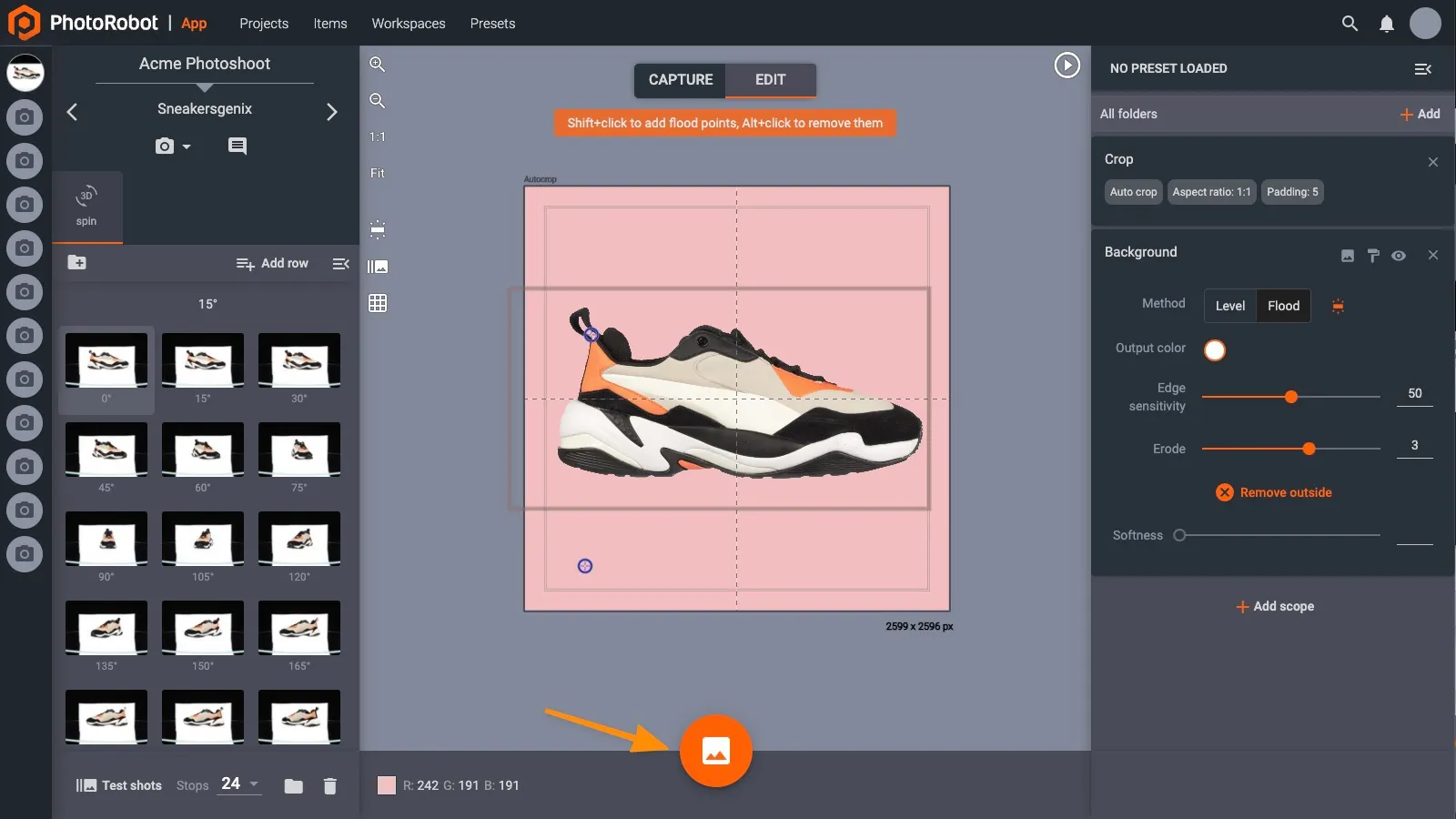
Starta en fotograferingssekvens
När du är nöjd med inställningarna, som verifierades genom att ta en testbild, är det dags att köra fotograferingssekvensen. Detta kan utlösas genom att trycka på mellanslagstangenten på tangentbordet eller genom att klicka på "start"-knappen som visas på bilden nedan.
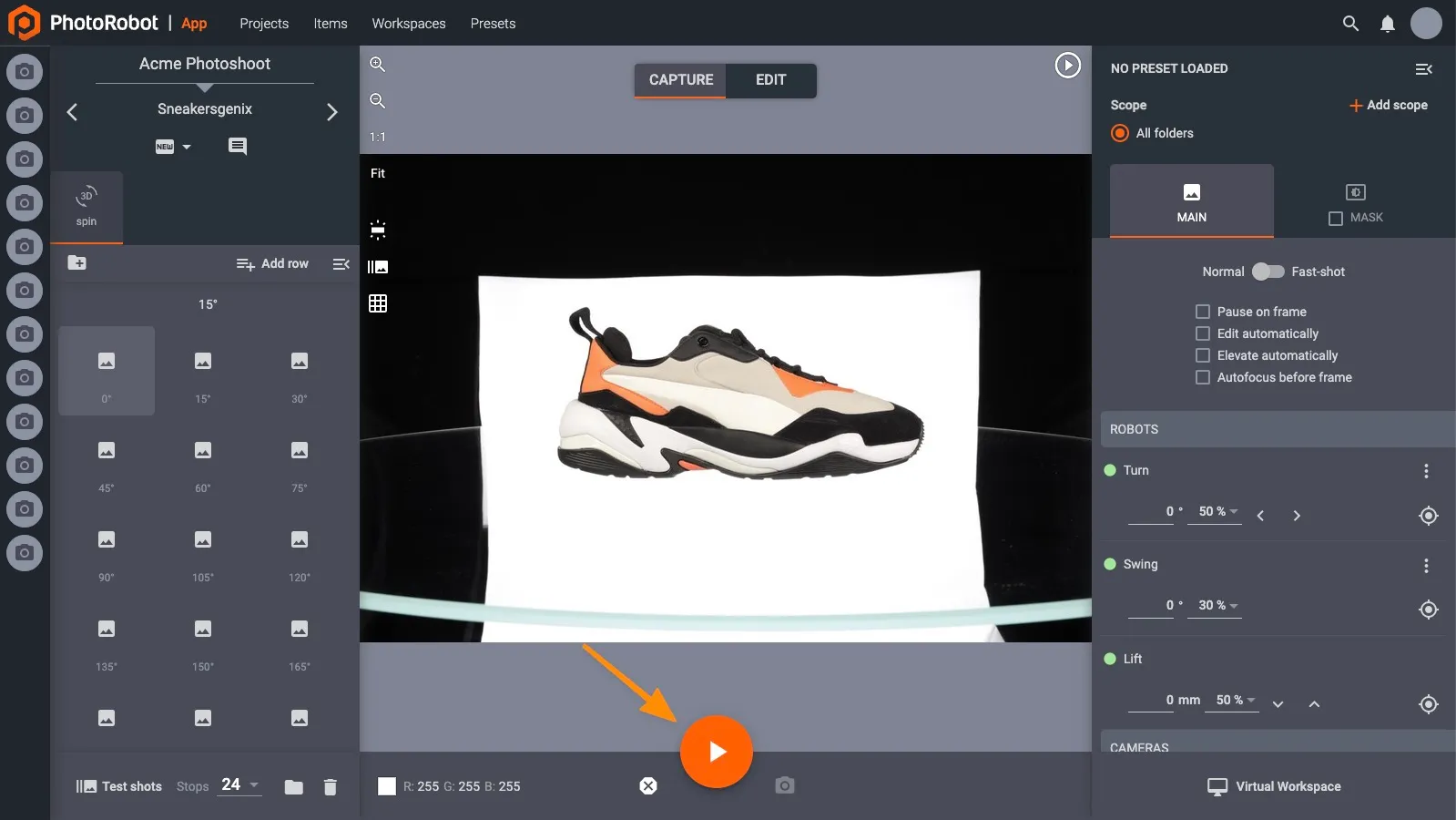
Om du har en streckkodsläsare kan du också utlösa sekvensen genom att skanna en speciell "start"-streckkod. Ladda ner PhotoRobot "start"-streckkoden online och skriv ut den för att använda den här funktionen.

Du kommer att veta att sekvensen har avslutats framgångsrikt om alla miniatyrer på vänster sida har fyllts med bilder. Det är en bra praxis att vara uppmärksam på eventuella feltändningar av stroboskopljusen.
Om någon av miniatyrerna är mörkare jämfört med de andra, sänk rotationshastigheten eller, om nödvändigt, kontrollera ljusets skick. Du kan sedan markera dessa bilder och skjuta dem igen utan att behöva köra hela sekvensen igen.
När inspelningssekvensen är klar kan du växla till redigeringsläge, där du kommer att utföra efterbehandling.
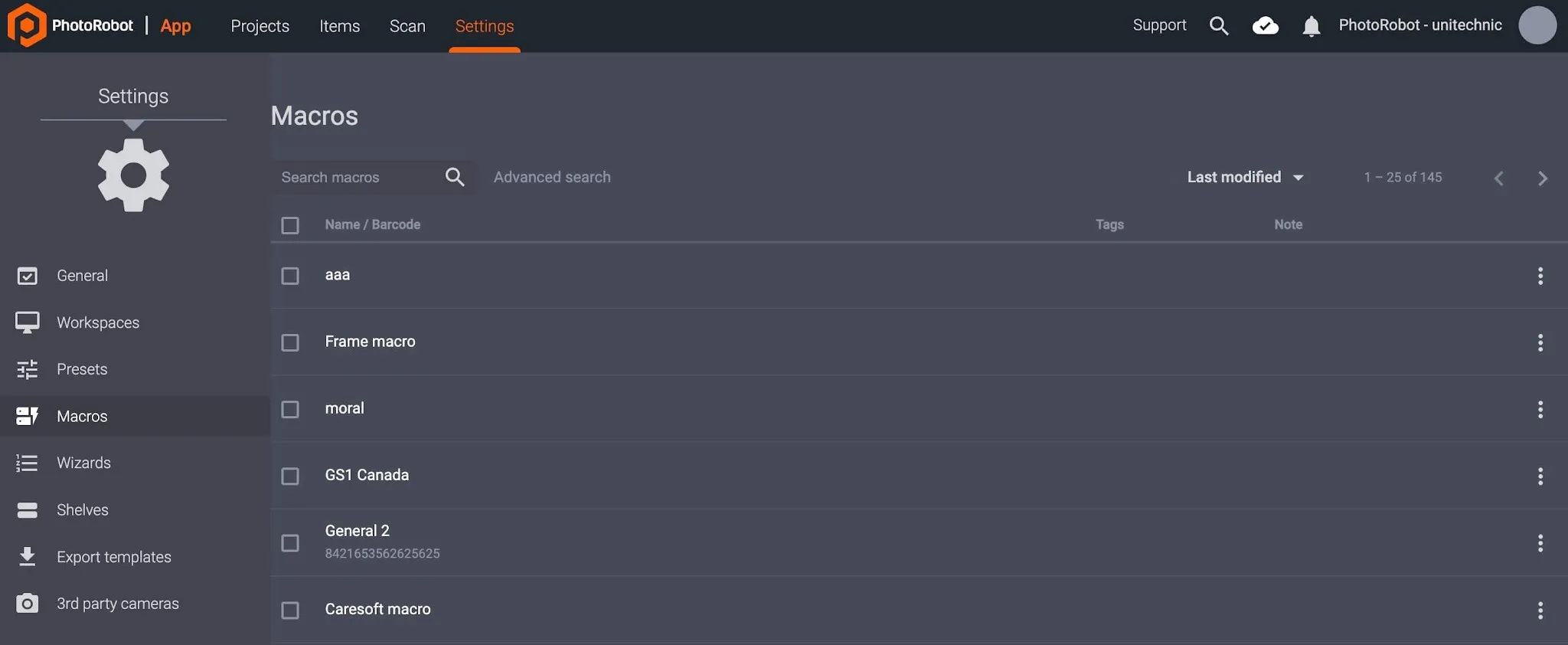
PhotoRobot Makron
Makron i CAPP gör det möjligt för användare att definiera kommandon för hämtningsprocessen för ett objekt och dess mappar (snurr, stillbilder osv.). Kommandon kan gälla för enskilda eller flera mappar, köra sekvenser, bildredigeringar, arbetsytor, förinställningar, kopiera bildinställningar och flytta bildinställningar. Användare kan också ytterligare anpassa makron efter namn, streckkod, tagg eller anteckningar.
Obs: För detaljerade instruktioner om konfiguration och användning av PhotoRobot Macros, se PhotoRobot Macros användarhandbok. Ta reda på hur makron möjliggör fotograferingsautomatiseringens magi över flera mappar och komponenter, med automatisk bearbetning av komplexa uppgifter.
PhotoRobot Wizards Mode
Guideläget i CAPP fungerar som ett alternativ till manuell konfiguration av hårdvara, kamera och sekvens. I användning gör guideläget det möjligt för en administratör eller fotograf att skapa olika guider för att förenkla inspelningsläget för produktionslinjeoperatörer. En operatör kan sedan starta CAPP i guideläget, vilket fungerar som ett extremt enkelt gränssnitt med guideledda steg. Det finns också begränsade kontroller för enkel användning och introduktion.
Efter att ha skapat en guide lagrar den förinställningar och arbetsytekonfigurationer, samt fördefinierade steg som operatörer måste följa. Operatörer kan inte justera några inställningar, och de måste slutföra instruktionerna i varje steg innan de kan gå vidare till nästa process.
Obs! Guidesteg definieras i ett JavaScript-liknande språkformat och skriptas av PhotoRobot-konsulter för anpassad funktionalitet. Användare kan också skripta grundläggande funktioner för initiala experiment eller enkla inställningar. För dokumentation om teknisk konfiguration och användning av guider, se PhotoRobot Användarmanual för guideläge.
Gränssnitt för redigeringsläge
Till höger på skärmen kan du lägga till valfritt antal redigeringsåtgärder:
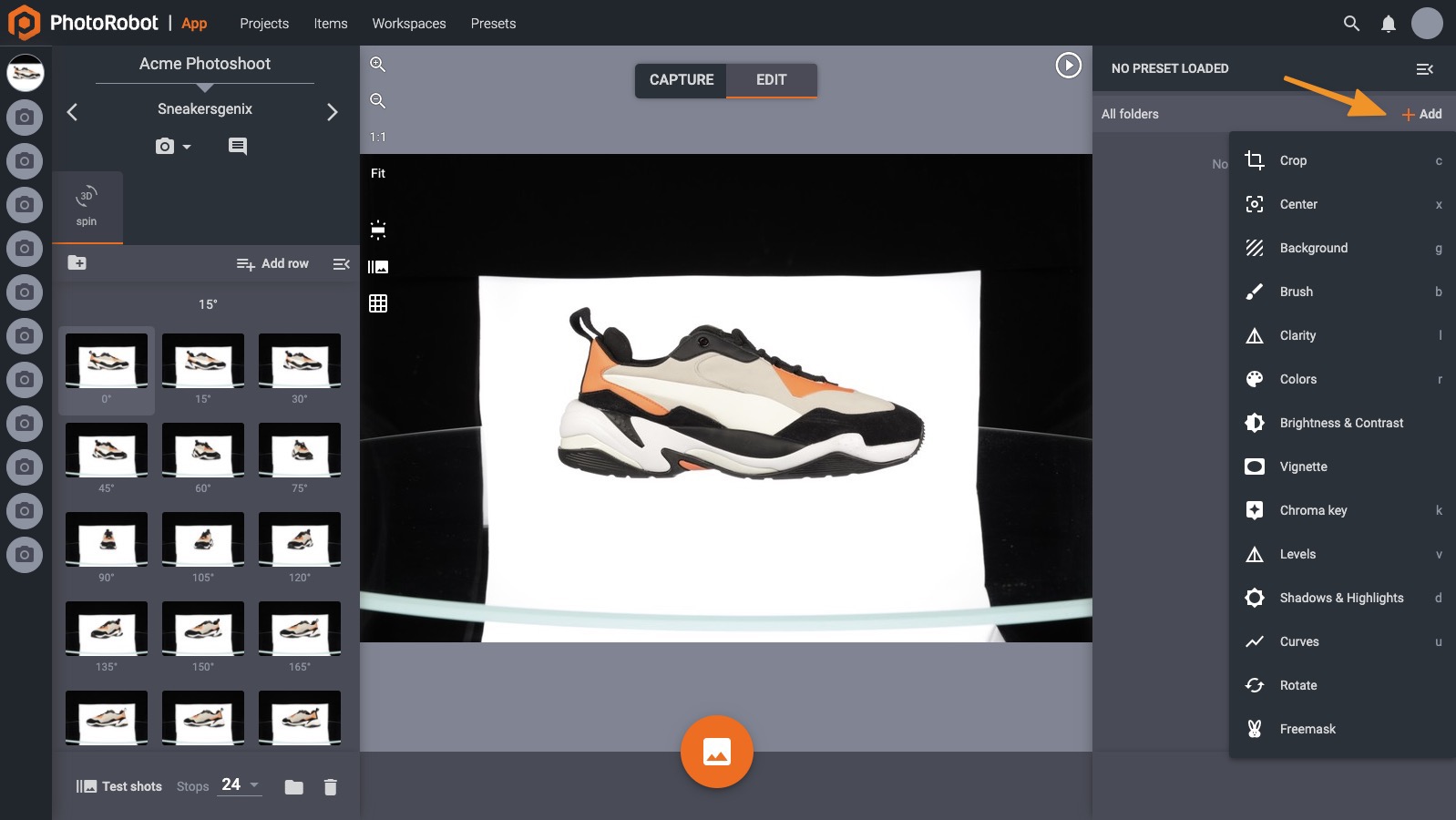
Några av de vanligaste redigeringsåtgärderna visas överst: beskära, centrera och bakgrund.
Automatisk beskärning
Beskära - när du beskär bilder finns det tre huvudkontroller: växlingarna för automatisk beskärning, bildförhållande och utfyllnad (som styr hur mycket utrymme det finns runt det fotograferade objektet).

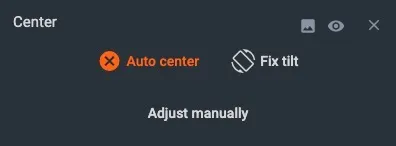
Auto center
Center - även om de flesta PhotoRobot maskiner är utrustade med lasrar som hjälper till att placera objekt på ytan, kommer de flesta bilder att behöva ytterligare programvarucentering. Detta är särskilt viktigt för 360° spins. När du kommer igång rekommenderas att funktionen "auto center" är på, som visas på bilden nedan:
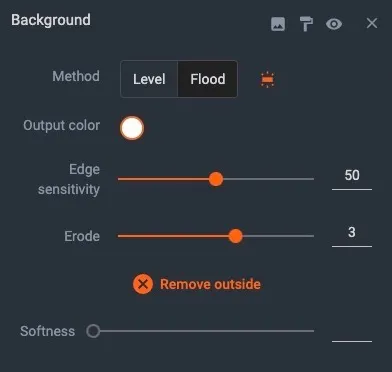
Borttagning av bakgrund
Bakgrundsoperationen justerar bakgrunden för en bild eller bilduppsättning och tar bort bakgrunden helt om så önskas. Olika resultat kan uppnås med de tre olika metoderna för borttagning av bakgrund i CAPP. Det finns bakgrundsborttagning efter nivå, bakgrundsborttagning genom översvämning och genom frimaskering.
- Bakgrundsborttagning efter nivå använder programvaruanalys av RGB-färgnivåer och ljusstyrka för att identifiera bakgrunden och förgrunden. Detta är fördelaktigt när du fotograferar ljusa eller vita föremål och när du använder en vit bakgrund. Justera nivåerna i programvaran för att göra bakgrundens ljusstyrka högre i intensitet tills den blir rent vit. Det är då möjligt att göra bakgrunden transparent, eller att byta ut olika färgbakgrunder.
- Bakgrundsborttagning genom översvämning fungerar enligt liknande principer som bakgrundsborttagning efter nivå och är oftast användbart när du fotograferar mörkare objekt. Om du tar bort bakgrunden genom översvämningsoperationen blir bakgrundens ljusstyrka mer intensiv tills den blir rent vit runt objektet. Men istället för att justera nivåerna använder verktyget en vald punkt för att identifiera bakgrunden och sedan "översvämmar" det området. Användare klickar helt enkelt på en punkt utanför det fotograferade objektet. Programvaran känner sedan av objektets kanter och tillämpar flooding för att fylla i det tillgängliga utrymmet runt det.
- Fri bakgrundsborttagning kräver mer konfiguration än att använda nivåer eller översvämning, men det kan vara en av de mest exakta och snabbaste metoderna. Den här metoden använder en utskuren maskbild och en huvudbild av produkten, som sätter ihop de två bilderna för att ta bort bakgrunden. Ibland är detta det enda effektiva sättet att ta bort bakgrunden runt mer "svåra" föremål. Ta till exempel reflekterande föremål, eller föremål som innehåller områden med tomt utrymme. Freemasking identifierar objektet jämfört med allt tomt utrymme, samtidigt som bakgrunden runt objektet och inuti det tas bort om det behövs. Metoden kräver dock ytterligare konfiguration av studioljus för att skapa huvud- och maskbilder för bakgrundsborttagning.
Not: Kom ihåg att om CAPP kommer att kunna ta bort bakgrunden eller inte beror främst på hur scenen är upplyst. Om du inte kan hitta inställningar som fungerar till belåtenhet, ta om bilderna med olika ljusinställningar.
När du är nöjd med dina redigeringsinställningar, tillämpa parametrarna genom att klicka på knappen "använd", som tidigare fanns där "start"-knappen visades.
Publicera bilder
När förloppsindikatorn har nått sitt slut har dina redigeringar tillämpats på dina bilder. Om du använder CAPP utan PhotoRobot molntjänster lagras dina resulterande bilder i en mappstruktur på din lokala enhet.
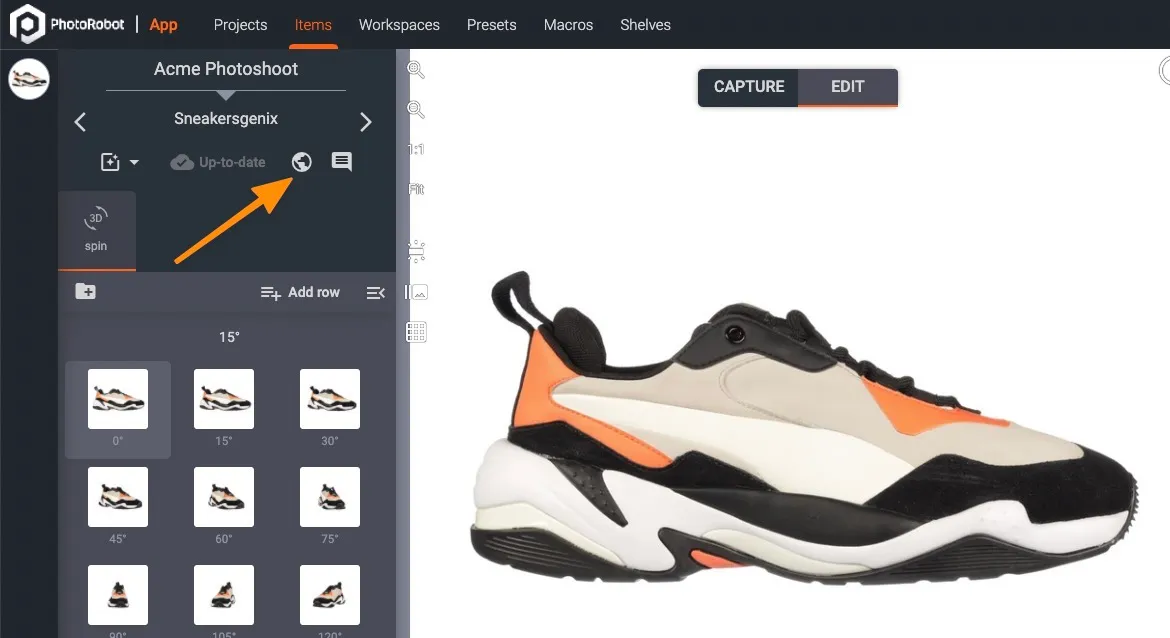
Om du använder PhotoRobot Cloud hosting kan filer också hittas i PhotoRobot molnlagring. Om du vill komma åt dessa klickar du på Öppna i molnet i avsnittet Foton längst upp till vänster på skärmen.
Exportera bilder
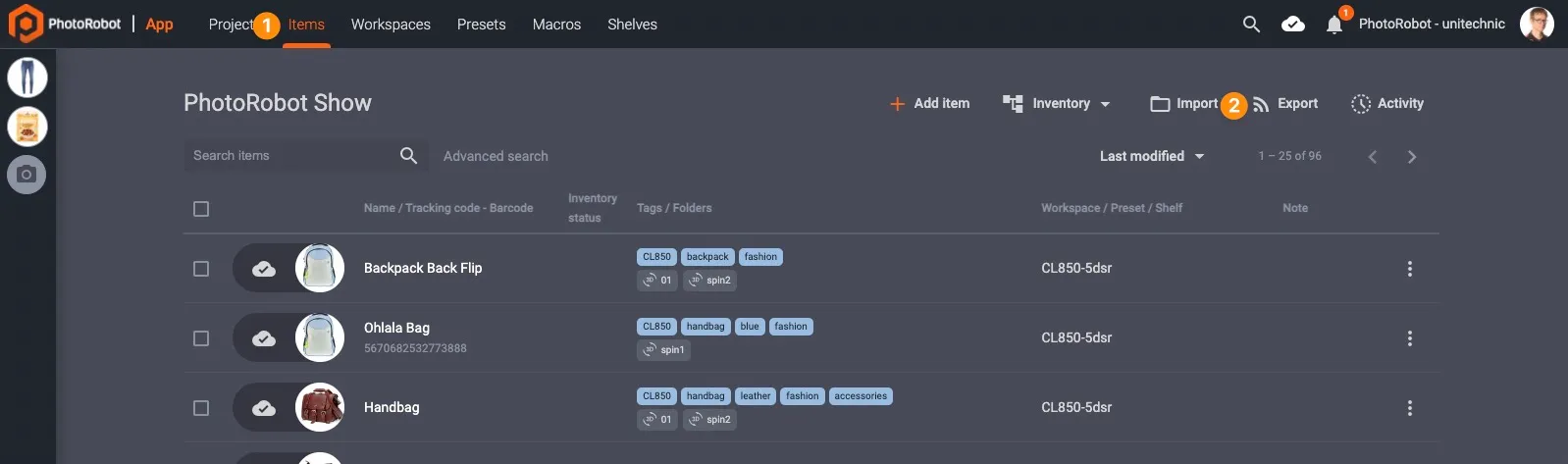
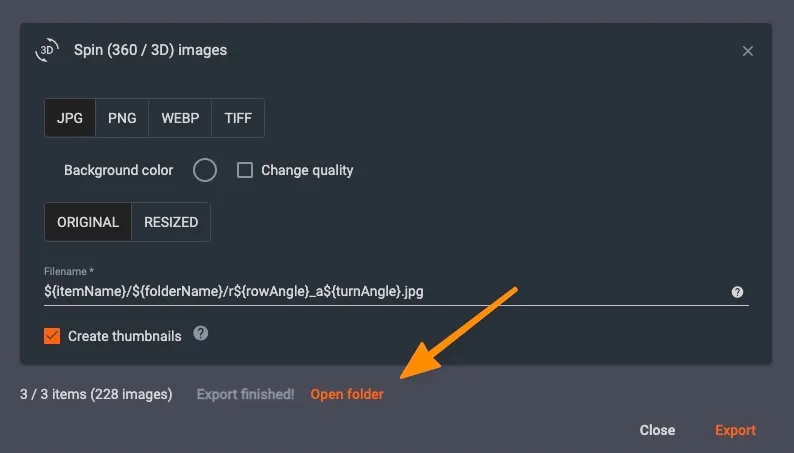
Om du vill exportera ett objekt från CAPP kan användare exportera till en lokal disk eller exportera till PhotoRobot Cloud. Objektexport gör det möjligt att definiera objekt med anpassade namnkonventioner, ange bildformat, upplösning och olika variabler för filnamnsmallar.
För att komma åt Objektexportinställningar, gå till avsnittet Objekt och klicka på Exportera i menyn ovanför objektlistan:
Följande fönster öppnas, så att du kan ändra exportinställningarna:
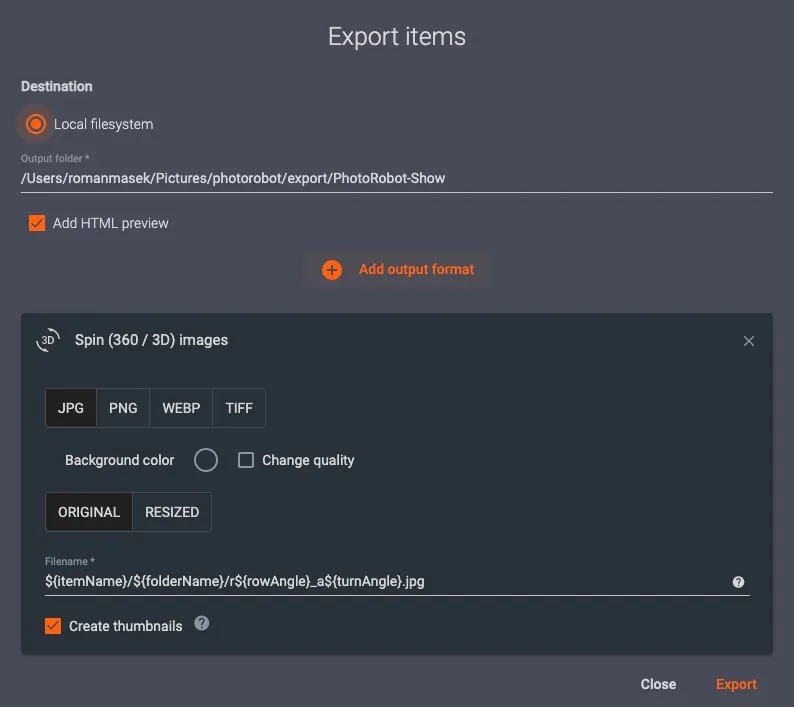
Kör exportprocessen genom att klicka på knappen Exportera längst ned till höger i det här fönstret.
När fältet för exportstatus har nått sitt slut kan du klicka på Öppna mapp för att komma åt dina exporterade bilder.
Publicera via molnet
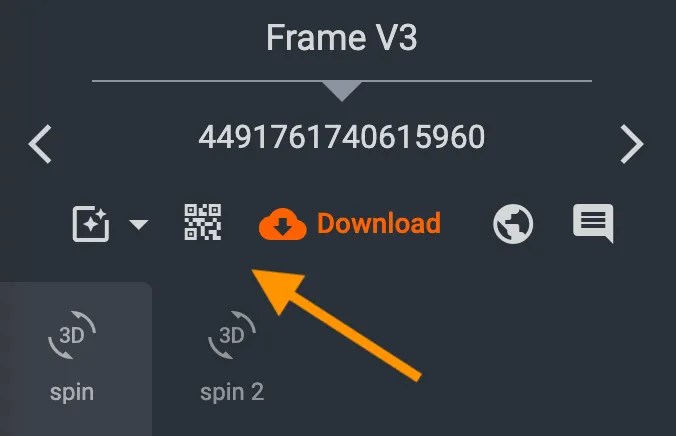
Om du publicerar via PhotoRobot Cloud services öppnar du först objektet i molnet. Gränssnittet visar den tagna bilden. Klicka på knappen Koder och länkar:
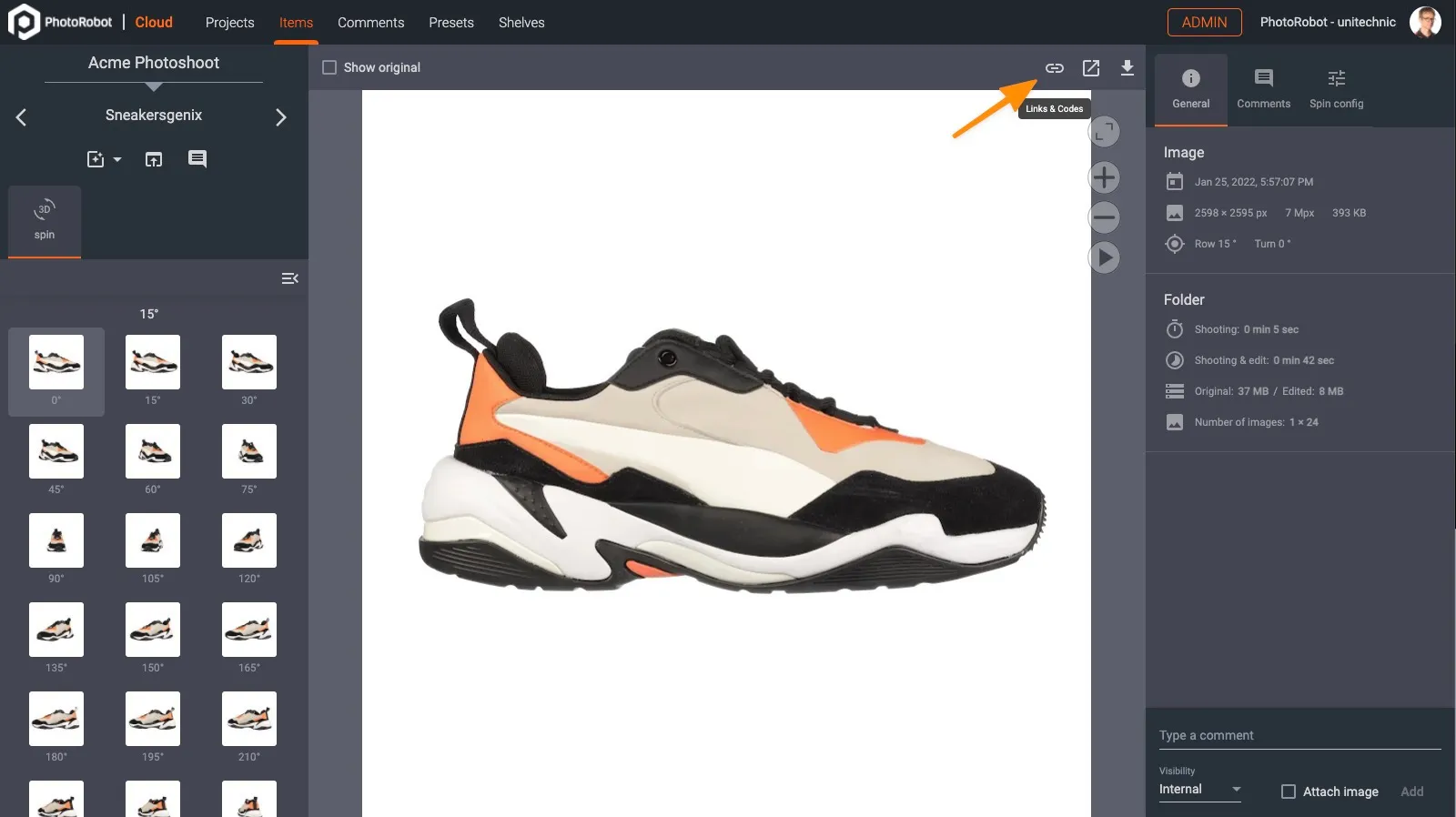
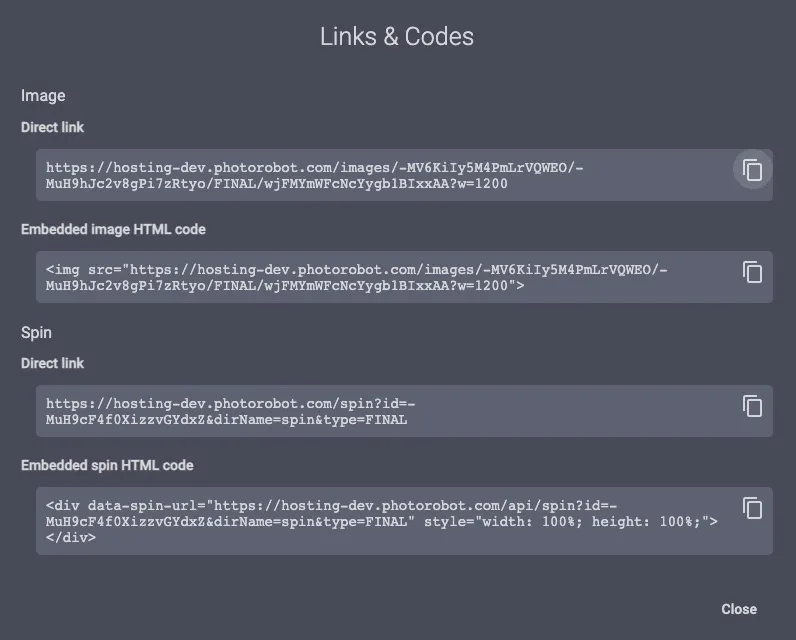
Kopiera direktlänken och klistra in den i din webbläsare för att se bilden eller spinna. Om du är nöjd kopierar du den inbäddade spin HTML-koden. Klistra in den här koden på sidan för att bädda in spin for display.


EOS Rebel-serien


EOS DSLR-serien


EOS M kompakta systemlösa system


PowerShot-serien


Närbild / Handhållen

Canon EOS Rebel-serien erbjuder nybörjarvänliga DSLR-kameror med solid bildkvalitet, intuitiva kontroller och mångsidiga funktioner. Dessa kameror är idealiska för fotoentusiaster och ger pålitlig autofokus, pekskärmar med variabel vinkel och videoinspelning i Full HD eller 4K.
Samband
Upplösning (MP)
Resolution
Canon EOS DSLR-serien levererar bilder av hög kvalitet, snabb autofokus och mångsidighet, vilket gör den idealisk för både fotografering och videoproduktion.
Samband
Upplösning (MP)
Resolution
Canon EOS M spegellösa kameror kombinerar kompakt design med DSLR-liknande prestanda. Med utbytbara objektiv, snabb autofokus och högkvalitativa bildsensorer är dessa kameror perfekta för resenärer och innehållsskapare som söker bärbarhet utan att offra bildkvaliteten.
Samband
Upplösning (MP)
Resolution
Canon PowerShot-serien erbjuder kompakta, användarvänliga kameror för hobbyfotografer och entusiaster. Med modeller som sträcker sig från enkla peka-och-skjut till avancerade zoomkameror ger de bekvämlighet, solid bildkvalitet och funktioner som bildstabilisering och 4K-video.
Samband
Upplösning (MP)
Resolution
Canons närbildskameror och handhållna kameror är utformade för detaljerad fotografering och video på nära håll. De är kompakta och enkla att använda och erbjuder precisionsfokus, högupplöst bildbehandling och mångsidiga makrofunktioner – perfekt för vloggning, produktfotografering och kreativa närbilder.
Samband
Upplösning (MP)
Resolution


